可用于仿真的资产
我们将机器人、传感器和组件转化为可用于仿真、即插即用的资产,这些资产可以无缝集成到现代人工智能训练、基准测试和自动化工作流程中,从而加速客户的采用。
- 硬件供应商通常被排除在人工智能训练流程之外。
- 客户无法在实际场景中评估组件
- 整合摩擦会减缓采用速度。
让我们使您的硬件可训练、可比较且易于自动化!

- 创建仿真级组件和机器人模型以及控制器
- 资产目录集成
- 与现代训练流程即插即用兼容性
业务成果
- 全球先试后买无障碍
- 更快的客户采纳
- 降低系统集成商的集成成本
- 人工智能驱动的自动化项目可见性提高
目标客户
- 机器人OEM厂商
- 传感器制造商
- 末端执行器和工具供应商
关键技术
- OpenUSD/URDF流水线
- pxIsaacSimURDFImporter
- Isaac Sim 和 Isaac Lab 训练环境
- ROS 2
仿真优先自动化
在您花钱购买硬件之前,先降低自动化风险
自动化项目往往后期失败且代价高昂。布局问题、安全限制、低估的周期时间和集成风险通常只有在硬件安装完毕后才会被发现。此时,任何更改都将变得缓慢、昂贵且具有破坏性。
我们采用的“仿真优先”方法将这些决策提前做出。
我们创建您真实环境和流程的高保真数字孪生模型,使您能够在实际部署之前分析、优化和验证自动化概念。
我们提供什么
您的环境的数字孪生
我们创建物理上精确、照片级逼真数字孪生的真实运营环境,包括生产线、仓库和物流区、商业厨房以及工业和半公共空间。
这些数字孪生模型基于真实的几何形状、真实的约束条件和真实的传感器行为构建而成,而非简化的模型或抽象的规划模型。这确保了仿真结果在应用于现实世界时仍然有效。
业务成果
- 降低资本支出风险:在购买硬件之前验证布局、工作流程和自动化方案。
- 更快的决策速度:在同一虚拟环境中比较多种自动化方法
- 更短的调试时间:减少现场意外情况和后期变更。
- 供应商中立的评估:让解决方案提供商在您的数字孪生模型中演示他们的系统,而不是在通用演示中演示。
你的数字孪生
开放。便携。随时可用。
- 从安全的云基础设施流式传输您的数字孪生数据
- 在您自己的本地服务器上部署和运行模拟
- 无需昂贵的本地GPU工作站
- 在公正的环境下对不同供应商的自动化和物理人工智能解决方案进行基准测试
- 可扩展的按需付费计算资源
过程建模与优化
在数字孪生模型中,我们进行建模和分析
- 机器人工作空间和约束
- 物料和工艺流程
- 安全区域、限制条件和风险情况
- 吞吐量、利用率和运营瓶颈
这使得我们可以基于可衡量的系统行为做出数据驱动的决策,用经过验证的见解取代假设和后期修正。
典型应用案例
我们基于数字孪生的方法通常应用于
- 工厂和仓库重新设计
- 自动化和物理人工智能可行性研究
- 供应商比较和投标支持
- 安全性、合规性和吞吐量验证
- 持续改进和长期优化计划
为什么选择Proximity Robotics
- 高保真仿真代替简化的规划工具
- 真实的物理原理和逼真的传感器建模
- 与供应商和硬件无关的方法
- 在机器人、自动化和感知方面拥有深厚的背景
- 丰富的经验 + 优秀的合作伙伴,助力安全和网络安全
对我们来说,仿真不是可视化工具,而是一个决策工具、一个机器人和具身智能训练设施以及一个评估平台。
随着业务的发展,数字孪生也会随之发展,成为一项长期资产,而不是一次性的项目交付成果。
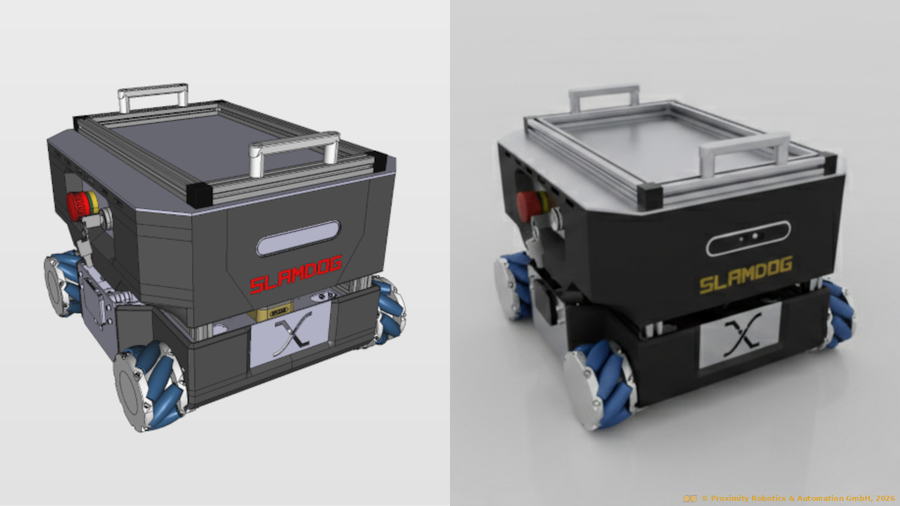
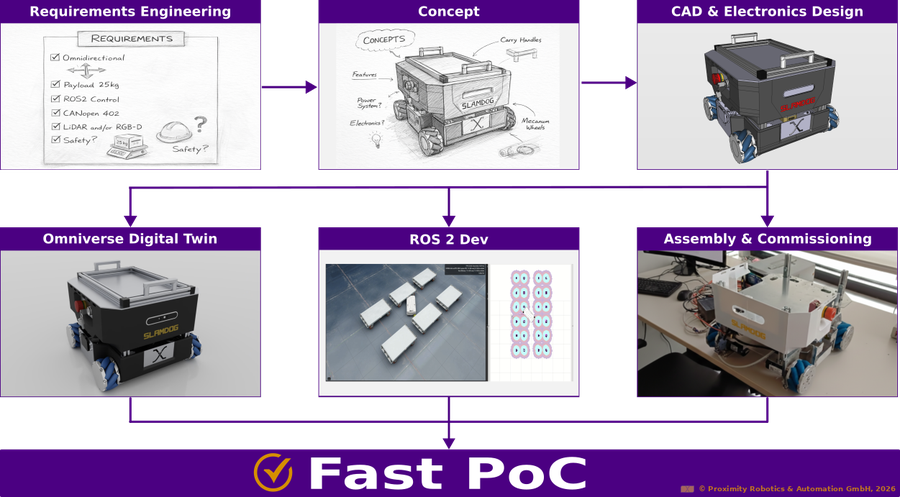
快速概念验证(PoC)
快速将您的概念转化为可运行的系统。
我们通过PoC快速开发 、控制器调参、硬件集成和现场部署来连接仿真环境和现实世界,最大限度地降低集成风险并缩短获得可衡量结果的时间。
我们的方法
我们设计的快速 PoC 方法旨在以可控、可重复和面向业务的方式弥合仿真环境和现实世界之间的差距。
通过将高保真数字孪生体重新用作决策、训练和验证环境,我们确保在仿真中行之有效的方法能够清晰地应用于生产车间。
我们的重点不是演示,而是经受住现实世界约束的可行性证明。
我们提供什么
仿真到硬件的过渡
我们从经过验证的仿真概念出发,
- 重用数字孪生模型进行控制器调优和系统验证
- 将感知、规划和学习流程直接迁移到硬件
- 在进行物理测试之前,验证极端情况和故障场景。
仿真在整个概念验证开发过程中始终是一个活跃的组成部分,而不是一次性的步骤。
快速现场概念验证(PoC)部署
我们在现场部署物理人工智能系统:
- 选定的机器人、传感器和基础设施
- 对日常运营的影响降至最低
- 受控测试场景和安全边界
这样一来,利益相关者就可以及早评估系统的实际行为,而无需等待“成品”。
Hardware-in-the-Loop和迭代验证
我们结合
- Hardware-in-the-Loop(HIL) 测试
- 真实世界数据反馈( Sim2Real2Sim)
- 与仿真结果进行持续比较
该循环能够在保持系统行为可追溯性和控制性的同时,实现快速迭代。
为什么选择Proximity Robotics
- 以仿真为先,但以现实世界为导向
- 在物理人工智能、控制、感知和安全方面拥有深厚的专业知识
- 与供应商和硬件无关
- 在将研究成果转化为可部署系统方面拥有丰富的经验
- 在工业、物流和安全关键型环境方面拥有经验
对我们来说,仿真不是可视化工具,而是一种决策工具、物理人工智能训练设施和评估平台。
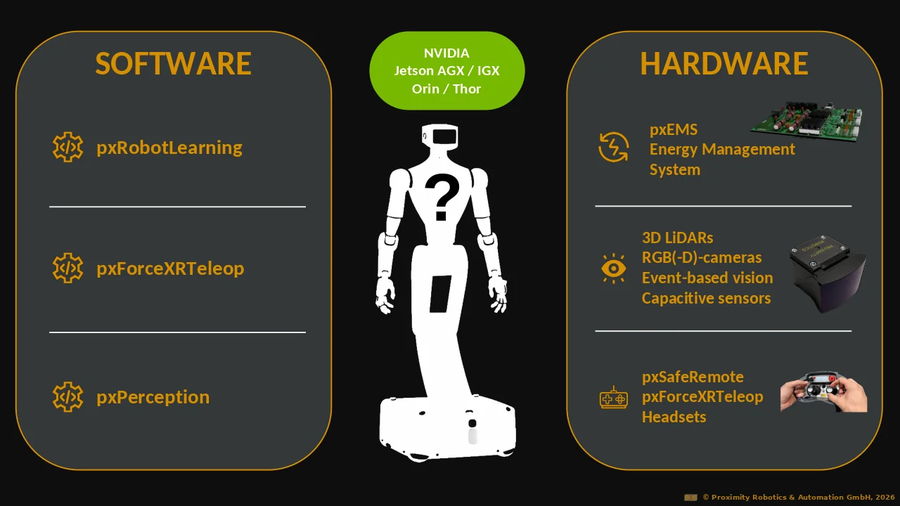
促成者
该解决方案由紧密集成的技术栈实现,该技术栈结合了高保真仿真、可扩展的物理人工智能训练管道和加速边缘部署:
- NVIDIA Omniverse Isaac Sim & Isaac Lab
- pxRobotLearning (IL & RL)
端到端的数据收集、模仿学习、强化学习、基准测试和推理——旨在从模拟无缝过渡到真实硬件。 - NVIDIA Jetson AGX Orin / Thor
加速边缘计算平台,使机器人能够直接进行低延迟感知、控制和物理人工智能推理。 - ROS 2
主权具身智能与机器人
随着机器人变得智能、互联和自主,它们也成为了数据生产者、决策者和安全相关系统。
许多组织面临日益严峻的挑战:
- 在不透明的云服务中处理敏感的运营数据
- 对海外供应商提供的人工智能模型和更新的依赖
- 训练模型和生成数据的所有权不明确
- 围绕数据保护、安全和网络安全的监管压力
- 人工智能和控制层面来自供应商的锁定风险
在安全至关重要的工业、医疗保健和公共环境中,信任、透明度和控制已不再是可有可无的。
我们认为物理人工智能必须能够在你们的规则下部署:
- 您可自行决定数据的处理和存储位置。
- 您可以控制机器人上运行哪些模型。
- 您保留对数据、模型和系统行为的所有权。
主权具身智能并非限制硬件选择,而是拥有并控制机器人系统的智能层。
我们使客户能够使用来自国际供应商的机器人和组件,同时确保感知、控制和决策始终在您的控制之下。
硬件可以来自任何地方。
智能层由你掌控!

我们提供什么
与硬件无关的集成
我们整合了来自国际供应商的机器人和组件,同时:
- 检查和验证机载计算和通信路径
- 根据需要解耦强制性云依赖项
- 在硬件驱动程序和系统智能之间建立清晰的界限
这样一来,您就可以采用全球硬件平台,而无需放弃架构控制权。
可信机器人控制
必要时,我们会集成我们自己的上层控制器基于:
- NVIDIA Jetson (AGX|IGX) (Orin|Thor)
我们部署了可以实现的上层机器人控制和人工智能堆栈:
- 基于开源软件
- 专有且客户所有
- 根据您的任务进行微调的基础模型
这样可以确保决策逻辑保持透明、可审计,并处于您的控制之下。
主权具身智能架构
我们设计并部署能够运行的具身智能系统
- 完全私有化部署
- 在欧盟托管的云环境中
- 或者采用根据您的合规性要求定制的混合架构
我们可以确保
- 运营数据绝不会离开您定义的基础设施。
- 训练、推理和日志记录都是完全可追溯的。
- 模型更新和重新训练遵循您的管理规则
合规性感知部署
我们的系统在设计时充分考虑了:
- 工业安全标准
- 网络安全要求
- 数据保护和治理框架
这种方法可以降低后续审计、认证和监管审查过程中的风险。在这些阶段,我们可以为您对接值得信赖的、专注于安全和网络安全领域的合作伙伴。
为什么选择Proximity Robotics
- 立足欧洲,拥有全球技术专长和广泛的国际合作伙伴网络
- 在机器人和人工智能部署方面拥有丰富的经验
- 从设计上就独立于供应商和云平台。
- 具备将研究成果转化为稳健的工业系统的能力
我们不会要求你信任一个黑盒子。
我们构建您可以拥有、检查和控制的物理人工智能系统。
促成者
- 开放和标准化基金会
开源仿真和训练(NVIDIA Isaac Sim、Isaac Lab)、开放的 VLA 模型和开放的标准格式(URDF、OpenUSD),以实现透明度和长期独立性(基于学习的机器人技术) - 安全与网络安全专业知识
与领先专家合作,确保物理人工智能系统合规、可靠且值得信赖。 - 生产级人工智能和机器人技术栈
ROS 2、DDS、ONNX/TensorRT 和 Proximity Robotics 的硬件加速堆栈,用于可靠的边缘部署(物理 AI 工具)
High-Precision Sensor-Based Sorting
Industrial sorting systems are increasingly challenged by lightweight, irregularly shaped and fast-moving materials. In conventional sensor-based sorting, objects are typically detected at one point in time and separated later by air jets or other actuators. Between detection and actuation, however, objects may change their trajectory due to shape, density, air resistance, vibration or uneven transport conditions. This leads to missed detections, inaccurate separation and reduced material purity.
Proximity Robotics develops event-based vision and real-time object tracking solutions that address this limitation directly. Instead of relying only on a single detection event, the system continuously tracks object motion with an event-based camera and predicts the correct actuation timing with very low latency. This enables sorting systems to react to the actual trajectory of each object rather than assuming constant motion.

Why it matters for machine builders
For equipment manufacturers, recycling technology providers and system integrators, this creates a path toward more robust and adaptive sorting machines. The technology can support higher sorting precision, improved handling of lightweight or aerodynamically unstable objects, and reduced dependence on mechanically perfect material flow. It is especially relevant for applications in recycling, food processing, bulk material handling and quality control.
The approach is designed for integration into existing and future sorting architectures. It can be combined with line-scan cameras, material classification systems, air-jet arrays, vibration feeders and other industrial sorting components. The core idea is simple: classification determines what should be separated, while event-based tracking determines where and when the object should be separated.
98.2% Sorting Accuracy Demonstrated:
- Mean ejection accuracy of 98.2% in the most demanding test setup
- Tested with six material classes including wheat, coffee beans, plastic pellets, plastic flakes, peanut shells and foam
- Clear improvement over simulated line-scan reference performance of 57.3%
- Designed to improve material purity and reduce false ejections
Track the Object, Not the Assumption
- Continuous trajectory tracking instead of one-time object detection
- Compensates for irregular motion, bouncing, slipping and unstable flight paths
- Especially effective for lightweight or aerodynamically unpredictable materials
- Reduces reliance on fixed-speed assumptions in the material flow
4 ms Low-Latency Tracking
- Event-based tracking with an effective system latency of 4 ms
- Enables precise timing of air-jet or actuator activation
- Suitable for fast-moving objects and high-throughput sorting processes
- Typical measured latencies around 2 ms under practical event rates
Better Handling of Difficult Materials
- Developed for materials with irregular shape, density and motion behavior
- Strong benefit shown for foam pieces and plastic flakes
- Helps separate objects that are difficult to predict with conventional line-scan systems
- Relevant for recycling, food processing and bulk material sorting
Less Mechanical Preconditioning
- Reduces dependency on perfectly uniform transport speeds
- Helps compensate for object-specific motion deviations in real time
- Can lower the need for complex mechanical flow homogenization
- Supports more flexible machine layouts and material handling concepts
Built for Existing Sorting Architectures
- Designed to work with line-scan cameras, classifiers, air-jet arrays and vibration feeders
- Event-based tracking complements existing material classification systems
- Can be adapted to different machine layouts, sensor positions and actuator configurations
- Suitable for retrofitting concepts and next-generation sorting machines
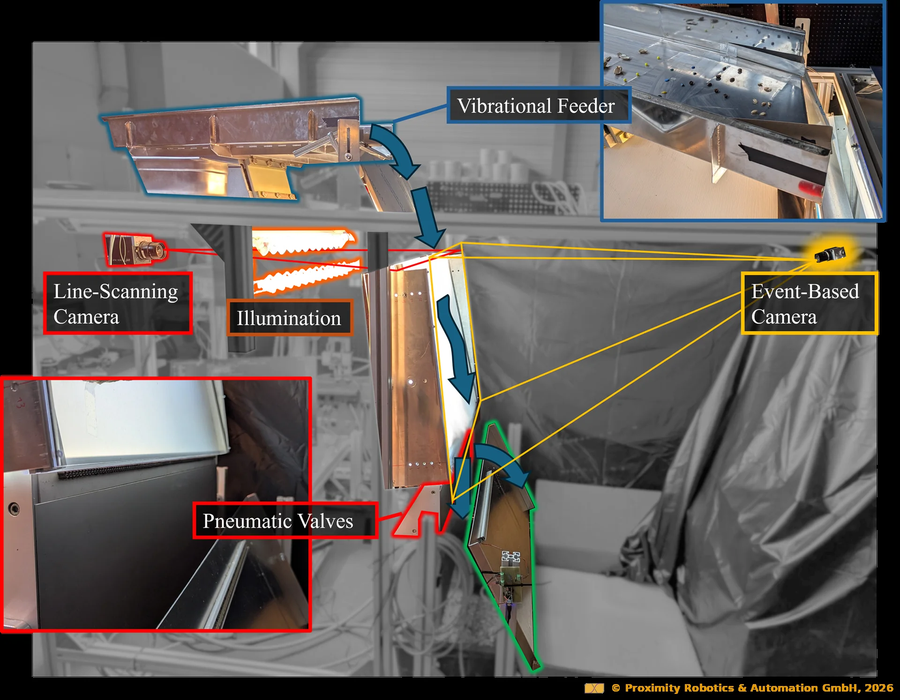
Demonstrated performance in the GRIZZLY project
Within the GRIZZLY research project, Fraunhofer IOSB and Proximity Robotics developed and validated a functional lab demonstrator for event-based object tracking in sensor-based sorting. The system combines line-scan camera classification with low-latency event-based tracking and multi-rate sensor fusion.
In systematic sorting experiments with six material classes, including wheat, coffee beans, plastic pellets, plastic flakes, peanut shells and foam pieces, the event-based tracking approach achieved a mean ejection accuracy of 98.2% in the most demanding activation window. This was compared against 57.3% for a simulated line-scan reference system and 88.7% for a frame-based tracking approach.
The strongest benefit was observed for materials with irregular flight behavior, where classical line-scan approaches can fail due to fixed motion assumptions. The developed event-based system reached an effective tracking latency of 4 ms, enabling precise actuator timing even under dynamic object motion.
From research demonstrator to industrial solution
The GRIZZLY demonstrator shows how event-based vision can become a practical enabling technology for next-generation sorting systems. The developed software modules for calibration, multi-rate sensor fusion and real-time event tracking are modular and can be adapted to different machine layouts, actuator configurations and sensor combinations.
For machine builders and industrial partners, Proximity Robotics offers the know-how to evaluate, adapt and integrate event-based tracking into application-specific sorting concepts. This includes feasibility studies, demonstrator development, sensor and actuator integration, latency analysis, performance evaluation and support for transitioning from lab validation to industrial pilot systems.
Technology background
This solution builds on the results of the GRIZZLY research project, funded under the DATIpilot program and carried out together with Fraunhofer IOSB. More technical details, project background and visual material are available on the GRIZZLY research page: