Simulation-Ready Assets
We turn robots, sensors, and components into simulation-ready, plug-and-play assets that integrate seamlessly into modern AI training, benchmarking, and automation workflows—accelerating customer adoption.
- Hardware vendors are usually excluded from AI training pipelines
- Customers cannot evaluate components in realistic scenarios
- Integration friction slows adoption
Let's make your hardware trainable, comparable, and automation-ready!

- Creation of simulation-grade component and robot models, as well as controllers
- Asset catalog integration
- Plug-and-play compatibility with modern training pipelines
Business outcomes
- Global Try-Before-You-Buy Accessibility
- Faster customer adoption
- Lower integration cost for system integrators
- Increased visibility in AI-driven automation projects
Target customers
- Robot OEMs
- Sensor manufacturers
- End-effector and tooling suppliers
Enablers
- OpenUSD / URDF pipelines
- pxIsaacSimURDFImporter
- Isaac Sim and Isaac Lab training environments
- ROS 2
Simulation-First Automation
Reduce Automation Risk Before You Spend a Single Euro on Hardware
Automation projects fail late and expensively. Layout issues, safety constraints, underestimated cycle times, and integration risks are often discovered only after hardware is installed. At that point, changes are slow, costly, and disruptive.
Our Simulation-First approach moves these decisions upstream.
We create high-fidelity digital twins of your real environment and processes, allowing you to analyze, optimize, and validate automation concepts before physical deployment.
What We Deliver
Digital Twins of Your Environment
We create physics-accurate, photorealistic digital twins of real operational environments, including production lines, warehouses and logistics areas, commercial kitchens, as well as industrial and semi-public spaces.
These digital twins are built on real geometry, real constraints, and realistic sensor behavior—not simplified mockups or abstract planning models. This ensures that results obtained in simulation remain meaningful when transferred to the real world.
Business Outcomes
- Lower CAPEX risk: validate layouts, workflows, and automation concepts before purchasing hardware
- Faster decision-making: compare multiple automation approaches in the same virtual environment
- Shorter commissioning time: fewer surprises on site, fewer late-stage changes
- Vendor-neutral evaluation: let solution providers demonstrate their systems in your digital twin—not in generic demos
Your Digital Twin
Open. Portable. Always usable.
- Stream your Digital Twin from secure cloud infrastructure
- Deploy and run simulations on your own on-premise servers
- No need for expensive local GPU workstations
- Benchmark automation and Physical AI solutions from different vendors in a neutral environment
- Scalable, pay-as-you-go compute resources
Process Modeling and Optimization
Within the digital twin, we model and analyze
- Robot workspace and constraints
- Material and process flows
- Safety zones, constraints, and risk situations
- Throughput, utilization, and operational bottlenecks
This enables data-driven decisions based on measurable system behavior, replacing assumptions and late-stage corrections with validated insights.
Typical Use Cases
Our digital twin–based approach is commonly applied to
- Factory and warehouse redesign
- Automation and Physical AI feasibility studies
- Vendor comparison and tender support
- Safety, compliance, and throughput validation
- Continuous improvement and long-term optimization programs
Why Proximity Robotics
- High-fidelity simulation instead of simplified planning tools
- True physics and realistic sensor modeling
- Vendor- and hardware-independent approach
- Strong background in robotics, automation, and perception
- Experience + great partners for Safety and Cybersecurity
For us, simulation is not a visualization tool - it is a decision-making instrument, a Robotics and Physical AI training facility, and an evaluation platform.
As your operations evolve, the digital twin evolves with them, remaining a long-term asset rather than a one-off project deliverable.
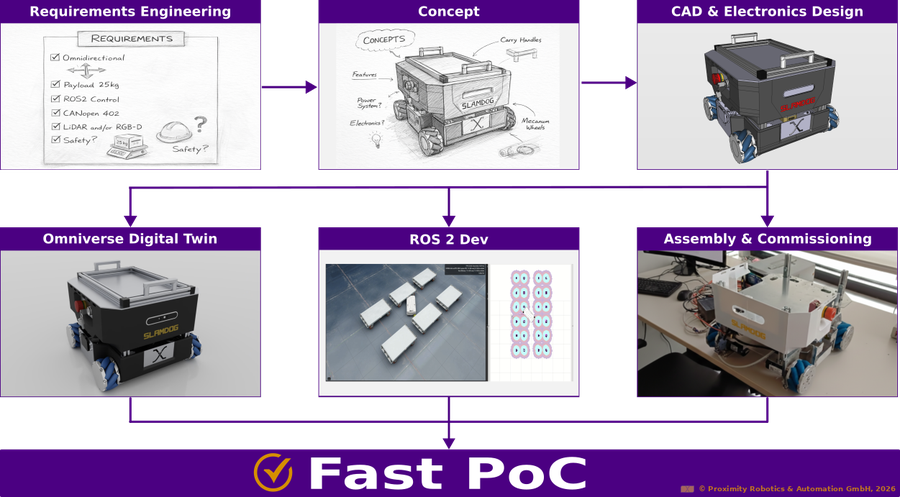
Fast Proof of Concept
Turn your concepts into working systems—fast.
We bridge simulation and reality by rapidly developing PoCs, tuning controllers, integrating hardware, and deploying on site, minimizing integration risk and shortening time to measurable results.
Our Approach
We designed our Fast PoC approach to bridge the gap between simulation and reality in a controlled, repeatable, and business-oriented way.
By reusing high-fidelity digital twins as decision, training, and validation environments, we ensure that what works in simulation has a clear path to the shopfloor.
Our focus is not on demos ⁃ it is on proofs of feasibility that survive real-world constraints.
What We Deliver
Simulation-to-Hardware Transition
We start from validated simulation concepts and
- Reuse digital twin models for controller tuning and system validation
- Transfer perception, planning, and learning pipelines directly to hardware
- Validate edge cases and failure scenarios before physical testing
Simulation remains an active part of development throughout the PoC—not a one-off step.
Rapid On-Site PoC Deployment
We deploy Physical AI systems on site with
- Selected robots, sensors, and infrastructure
- Minimal disruption to ongoing operations
- Controlled test scenarios and safety boundaries
This allows stakeholders to evaluate real system behavior early, rather than waiting for a “finished” product.
Hardware-in-the-Loop & Iterative Validation
We combine
- Hardware-in-the-Loop (HIL) testing
- Real-world data feedback (Sim2Real2Sim)
- Continuous comparison against simulation results
This loop enables fast iteration while maintaining traceability and control over system behavior.
Why Proximity Robotics
- Simulation-first, but reality-driven
- Deep expertise in Physical AI, control, perception, and safety
- Vendor- and hardware-independent
- Strong background in transitioning research into deployable systems
- Experience across industrial, logistics, and safety-critical environments
For us, simulation is not a visualization tool - it is a decision-making instrument, a Physical AI training facility, and an evaluation platform.
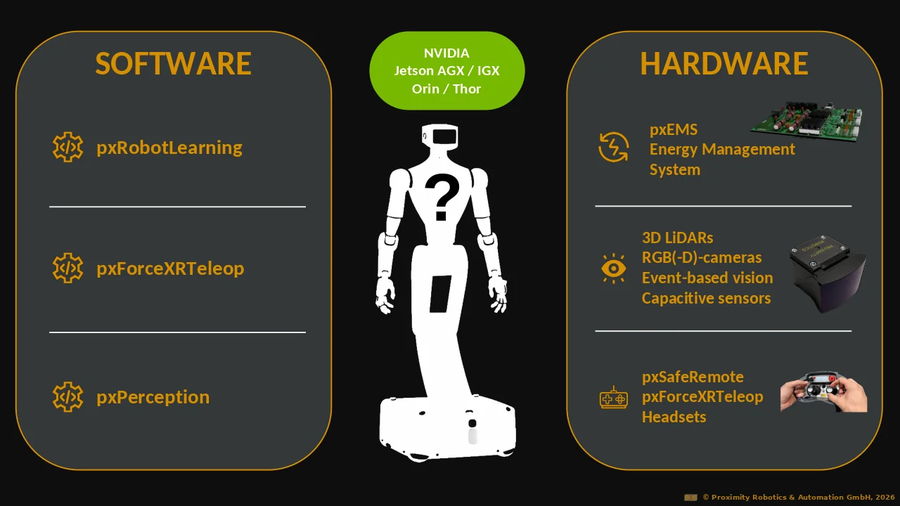
Enablers
This solution is enabled by a tightly integrated stack combining high-fidelity simulation, scalable Physical AI training pipelines, and accelerated edge deployment:
- NVIDIA Omniverse Isaac Sim & Isaac Lab
- pxRobotLearning (IL & RL)
End-to-end pipelines for data collection, imitation learning, reinforcement learning, benchmarking, and inference - designed to transition seamlessly from simulation to real hardware. - NVIDIA Jetson AGX Orin / Thor
Accelerated edge computing platforms enabling low-latency perception, control, and Physical AI inference directly on the robot. - ROS 2
Sovereign Physical AI & Robotics
As robots become intelligent, connected, and autonomous, they also become data producers, decision-makers, and security-relevant systems.
Many organizations face growing concerns:
- Sensitive operational data processed in opaque cloud services
- Dependence on overseas vendors for AI models and updates
- Unclear ownership of trained models and generated data
- Regulatory pressure around data protection, safety, and cybersecurity
- Risk of vendor lock-in at the AI and control level
In safety-critical, industrial, healthcare, and public environments, trust, transparency, and control are no longer optional.
We believe Physical AI must be deployable under your rules:
- You decide where data is processed and stored
- You control which models run on your robots
- You retain ownership of your data, models, and system behavior
Sovereign Physical AI is not about restricting hardware choices. It is about owning and controlling the intelligence layer of your robotic system.
We enable customers to use robots and components from international suppliers while ensuring that perception, control, and decision-making remain under your control.
The hardware can come from anywhere.
The intelligence layer is yours!

What We Deliver
Hardware-Agnostic Integration
We integrate robots and components from international suppliers while:
- Inspecting and validating onboard compute and communication paths
- Decoupling mandatory cloud dependencies where required
- Creating a clear separation between hardware drivers and system intelligence
This allows you to adopt global hardware platforms without surrendering architectural control.
Trusted Robot Control (HLC)
Where necessary, we integrate our own High-Level Controller based on:
- NVIDIA Jetson (AGX|IGX) (Orin|Thor)
We deploy high-level robot control and AI stacks that can be
- Open-source–based
- Proprietary and customer-owned
- Fine-tuned foundation models adapted to your tasks
This ensures that decision-making logic remains transparent, auditable, and under your control.
Sovereign Physical AI Architectures
We design and deploy Physical AI systems that can run
- Fully on-premises
- In EU-hosted cloud environments
- Or in hybrid architectures tailored to your compliance requirements
We can ensure that
- Operational data never leaves your defined infrastructure
- Training, inference, and logging are fully traceable
- Model updates and retraining follow your governance rules
Compliance-Aware Deployment
Our systems are designed with awareness of
- Industrial safety standards
- Cybersecurity requirements
- Data protection and governance frameworks
This approach reduces downstream risk during audits, certifications, and regulatory reviews. For these stages, we can connect you with trusted partners specializing in safety and cybersecurity.
Why Proximity Robotics
- Rooted in Europe, with global technology expertise and a broad international partner network
- Deep experience in robotics and AI deployment
- Vendor- and cloud-independent by design
- Proven ability to translate research into robust industrial systems
We don’t ask you to trust a black box.
We build Physical AI systems you can own, inspect, and control.
Enablers
- Open & Standardized Foundations
Open-source simulation and training (NVIDIA Isaac Sim, Isaac Lab), open VLA models, and open standard formats (URDF, OpenUSD) for transparency and long-term independence (Learning-Based Robotics) - Safety & Cybersecurity Expertise
Partnerships with leading experts to ensure compliant, resilient, and trustworthy Physical AI systems - Production-Grade AI & Robotics Stack
ROS 2, DDS, ONNX/TensorRT, and Proximity Robotics’ hardware-accelerated stacks for reliable edge deployment (Physical AI Tooling)
High-Precision Sensor-Based Sorting
Industrial sorting systems are increasingly challenged by lightweight, irregularly shaped and fast-moving materials. In conventional sensor-based sorting, objects are typically detected at one point in time and separated later by air jets or other actuators. Between detection and actuation, however, objects may change their trajectory due to shape, density, air resistance, vibration or uneven transport conditions. This leads to missed detections, inaccurate separation and reduced material purity.
Proximity Robotics develops event-based vision and real-time object tracking solutions that address this limitation directly. Instead of relying only on a single detection event, the system continuously tracks object motion with an event-based camera and predicts the correct actuation timing with very low latency. This enables sorting systems to react to the actual trajectory of each object rather than assuming constant motion.

Why it matters for machine builders
For equipment manufacturers, recycling technology providers and system integrators, this creates a path toward more robust and adaptive sorting machines. The technology can support higher sorting precision, improved handling of lightweight or aerodynamically unstable objects, and reduced dependence on mechanically perfect material flow. It is especially relevant for applications in recycling, food processing, bulk material handling and quality control.
The approach is designed for integration into existing and future sorting architectures. It can be combined with line-scan cameras, material classification systems, air-jet arrays, vibration feeders and other industrial sorting components. The core idea is simple: classification determines what should be separated, while event-based tracking determines where and when the object should be separated.
98.2% Sorting Accuracy Demonstrated:
- Mean ejection accuracy of 98.2% in the most demanding test setup
- Tested with six material classes including wheat, coffee beans, plastic pellets, plastic flakes, peanut shells and foam
- Clear improvement over simulated line-scan reference performance of 57.3%
- Designed to improve material purity and reduce false ejections
Track the Object, Not the Assumption
- Continuous trajectory tracking instead of one-time object detection
- Compensates for irregular motion, bouncing, slipping and unstable flight paths
- Especially effective for lightweight or aerodynamically unpredictable materials
- Reduces reliance on fixed-speed assumptions in the material flow
4 ms Low-Latency Tracking
- Event-based tracking with an effective system latency of 4 ms
- Enables precise timing of air-jet or actuator activation
- Suitable for fast-moving objects and high-throughput sorting processes
- Typical measured latencies around 2 ms under practical event rates
Better Handling of Difficult Materials
- Developed for materials with irregular shape, density and motion behavior
- Strong benefit shown for foam pieces and plastic flakes
- Helps separate objects that are difficult to predict with conventional line-scan systems
- Relevant for recycling, food processing and bulk material sorting
Less Mechanical Preconditioning
- Reduces dependency on perfectly uniform transport speeds
- Helps compensate for object-specific motion deviations in real time
- Can lower the need for complex mechanical flow homogenization
- Supports more flexible machine layouts and material handling concepts
Built for Existing Sorting Architectures
- Designed to work with line-scan cameras, classifiers, air-jet arrays and vibration feeders
- Event-based tracking complements existing material classification systems
- Can be adapted to different machine layouts, sensor positions and actuator configurations
- Suitable for retrofitting concepts and next-generation sorting machines
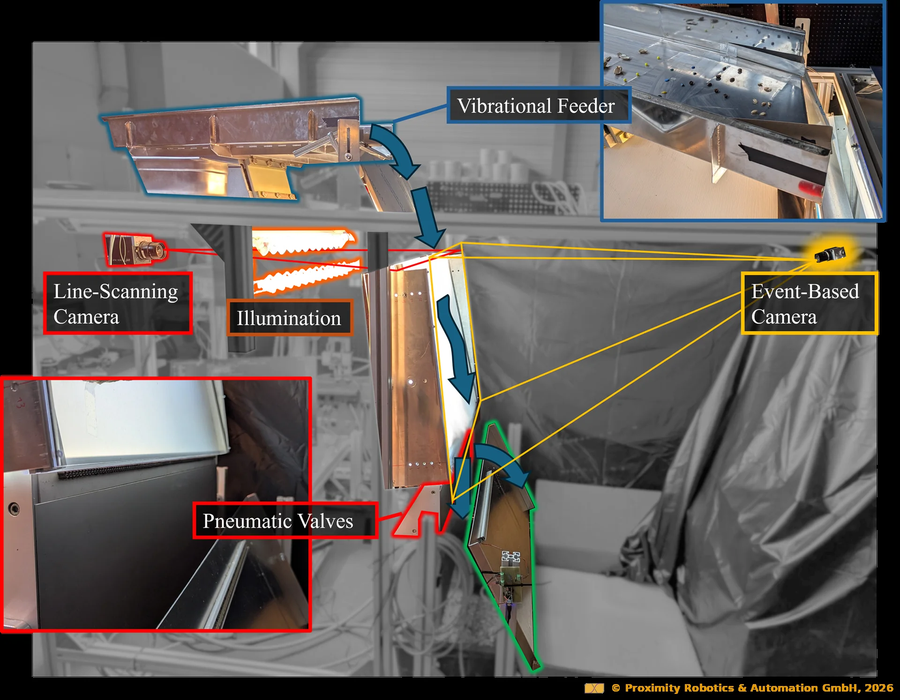
Demonstrated performance in the GRIZZLY project
Within the GRIZZLY research project, Fraunhofer IOSB and Proximity Robotics developed and validated a functional lab demonstrator for event-based object tracking in sensor-based sorting. The system combines line-scan camera classification with low-latency event-based tracking and multi-rate sensor fusion.
In systematic sorting experiments with six material classes, including wheat, coffee beans, plastic pellets, plastic flakes, peanut shells and foam pieces, the event-based tracking approach achieved a mean ejection accuracy of 98.2% in the most demanding activation window. This was compared against 57.3% for a simulated line-scan reference system and 88.7% for a frame-based tracking approach.
The strongest benefit was observed for materials with irregular flight behavior, where classical line-scan approaches can fail due to fixed motion assumptions. The developed event-based system reached an effective tracking latency of 4 ms, enabling precise actuator timing even under dynamic object motion.
From research demonstrator to industrial solution
The GRIZZLY demonstrator shows how event-based vision can become a practical enabling technology for next-generation sorting systems. The developed software modules for calibration, multi-rate sensor fusion and real-time event tracking are modular and can be adapted to different machine layouts, actuator configurations and sensor combinations.
For machine builders and industrial partners, Proximity Robotics offers the know-how to evaluate, adapt and integrate event-based tracking into application-specific sorting concepts. This includes feasibility studies, demonstrator development, sensor and actuator integration, latency analysis, performance evaluation and support for transitioning from lab validation to industrial pilot systems.
Technology background
This solution builds on the results of the GRIZZLY research project, funded under the DATIpilot program and carried out together with Fraunhofer IOSB. More technical details, project background and visual material are available on the GRIZZLY research page: