Simulation-Ready Assets
Wir transformieren Roboter, Sensoren und Komponenten in simulationsfähige Plug-and-Play-Assets, die sich nahtlos in moderne KI-Trainings-, Benchmarking- und Automatisierungs-Workflows integrieren lassen und so die Akzeptanz bei den Kunden beschleunigen.
- Hardwareanbieter sind üblicherweise von KI-Trainingsprozessen ausgeschlossen.
- Kunden können Komponenten nicht in realistischen Szenarien bewerten.
- Integrationsprobleme verlangsamen die Einführung
Sorgen wir dafür, dass Ihre Hardware trainierbar, vergleichbar und bereit für die Automatisierung ist!

- Erstellung sowohl von Komponenten- und Robotermodellen als auch von Steuerungen und Reglern in Simulationsqualität
- Integration des Anlagenkatalogs
- Plug-and-Play-Kompatibilität mit modernen Trainingspipelines
Geschäftsergebnisse
- Weltweite Verfügbarkeit zum Testen vor dem Kauf
- Schnellere Kundenakzeptanz
- Geringere Integrationskosten für Systemintegratoren
- Erhöhte Transparenz in KI-gesteuerten Automatisierungsprojekten
Zielkunden
- Roboter-OEMs
- Sensorhersteller
- Endeffektor- und Werkzeuglieferanten
Ermöglicher
- OpenUSD / URDF-Pipelines
- pxIsaacSimURDFImporter
- Isaac Sim- und Isaac Lab-Trainingsumgebungen
- ROS 2
Simulationsbasierte Automatisierung
Reduzieren Sie das Automatisierungsrisiko, bevor Sie auch nur einen Euro für Hardware ausgeben.
Automatisierungsprojekte scheitern oft spät und teuer. Probleme mit der Anordnung der Komponenten, Sicherheitsmängel, unterschätzte Zykluszeiten und Integrationsrisiken werden häufig erst nach der Hardwareinstallation entdeckt. Dann sind Änderungen nur noch langsam, kostspielig und mit erheblichen Störungen verbunden.
Unser Simulation-First-Ansatz verlagert diese Entscheidungen in frühere Produktionsschritte.
Wir erstellen hochpräzise digitale Zwillinge Ihrer realen Umgebung und Prozesse, die es Ihnen ermöglichen , Automatisierungskonzepte vor der physischen Implementierung zu analysieren, zu optimieren und zu validieren .
Was wir liefern
Digitale Zwillinge Ihrer Umgebung
Wir erstellen physikalisch korrekte, fotorealistische digitale Zwillinge realer Betriebsumgebungen, darunter Produktionslinien, Lagerhallen und Logistikbereiche, Großküchen sowie industrielle und halböffentliche Räume.
Diese digitalen Zwillinge basieren auf realer Geometrie, realen Randbedingungen und realistischem Sensorverhalten – nicht auf vereinfachten Modellen oder abstrakten Planungsmodellen. Dadurch wird sichergestellt, dass die in der Simulation erzielten Ergebnisse auch in der realen Welt aussagekräftig bleiben.
Geschäftsergebnisse
- Geringeres Investitionsrisiko : Layouts, Arbeitsabläufe und Automatisierungskonzepte vor dem Kauf von Hardware validieren.
- Schnellere Entscheidungsfindung : Vergleich mehrerer Automatisierungsansätze in derselben virtuellen Umgebung
- Kürzere Inbetriebnahmezeit : weniger Überraschungen vor Ort, weniger Änderungen in der Endphase
- Anbieterneutrale Evaluierung: Lassen Sie Lösungsanbieter ihre Systeme in Ihrem digitalen Zwilling demonstrieren – nicht in generischen Demos.
Ihr digitaler Zwilling
Offen. Tragbar. Immer einsatzbereit.
- Streamen Sie Ihren digitalen Zwilling aus einer sicheren Cloud-Infrastruktur .
- Simulationen auf Ihren eigenen lokalen Servern bereitstellen und ausführen
- Teure lokale GPU-Workstations sind nicht erforderlich.
- Benchmarking von Automatisierungs- und Physical-AI-Lösungen verschiedener Anbieter in einer neutralen Umgebung
- Skalierbare , nutzungsbasierte Rechenressourcen
Prozessmodellierung und -optimierung
Innerhalb des digitalen Zwillings modellieren und analysieren wir
- Arbeitsbereich und Einschränkungen des Roboters
- Material- und Prozessflüsse
- Sicherheitszonen, Einschränkungen und Risikosituationen
- Durchsatz, Auslastung und betriebliche Engpässe
Dies ermöglicht datengestützte Entscheidungen auf der Grundlage messbaren Systemverhaltens und ersetzt Annahmen und Korrekturen in späten Phasen durch validierte Erkenntnisse.
Typische Anwendungsfälle
Unser auf digitalen Zwillingen basierender Ansatz wird häufig angewendet bei
- Neugestaltung von Fabriken und Lagern
- Machbarkeitsstudien zu Automatisierung und Physical AI
- Anbietervergleich und Unterstützung bei Ausschreibungen
- Sicherheits-, Konformitäts- und Durchsatzvalidierung
- Programme zur kontinuierlichen Verbesserung und langfristigen Optimierung
Warum Proximity Robotics
- Hochpräzise Simulationen statt vereinfachter Planungswerkzeuge
- Realistische Physik und realistische Sensormodellierung
- Hersteller- und hardwareunabhängiger Ansatz
- Fundierte Kenntnisse in Robotik, Automatisierung und Perzeption
- Erfahrung + großartige Partner für Sicherheit und Cybersicherheit
Für uns ist Simulation kein Visualisierungswerkzeug – sie ist ein Entscheidungsinstrument , eine Trainingseinrichtung für Robotik und Physical AI sowie eine Evaluierungsplattform .
Mit der Weiterentwicklung Ihrer Geschäftsprozesse entwickelt sich auch der digitale Zwilling weiter und bleibt so ein langfristiges Asset und nicht nur ein einmaliges Projektergebnis.
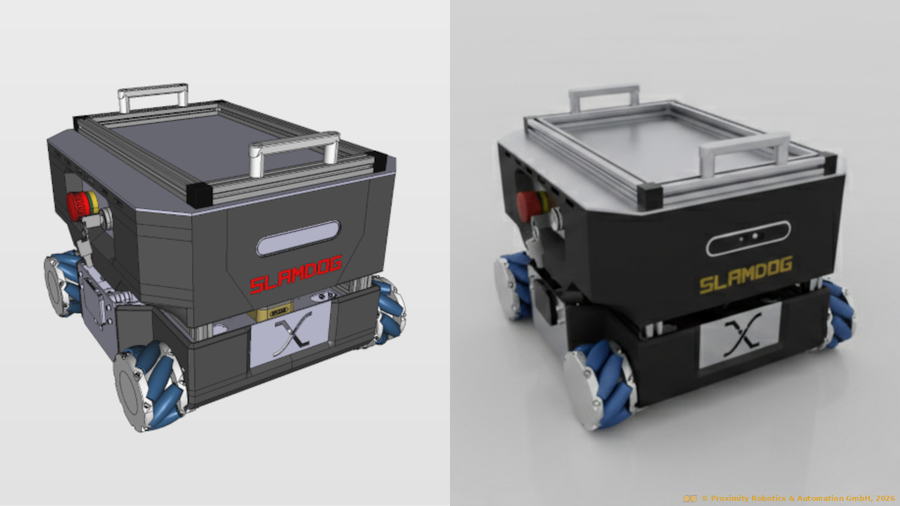
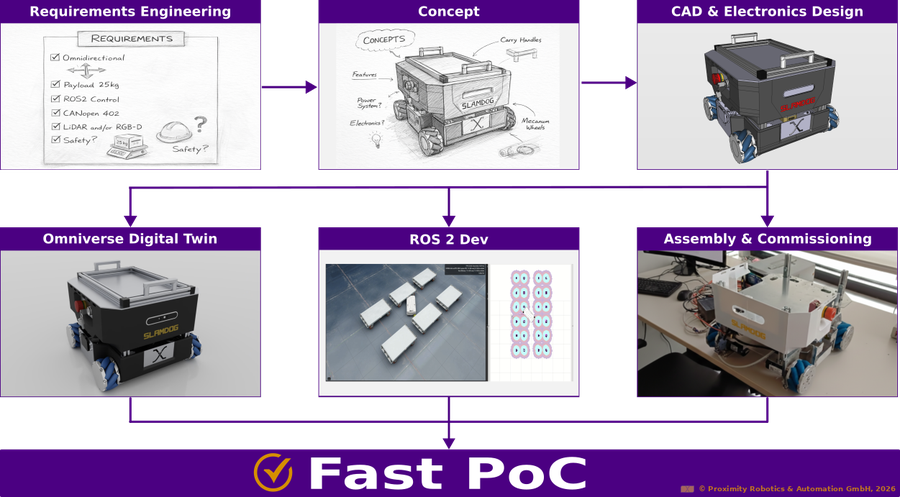
Schneller Proof of Concept
Setzen Sie Ihre Konzepte schnell in funktionierende Systeme um.
Wir schlagen die Brücke zwischen Simulation und Realität, indem wir schnell Machbarkeitsstudien (PoC) entwickeln, Regler abstimmen, Hardware integrieren und vor Ort einsetzen. Dadurch minimieren wir das Integrationsrisiko und verkürzen die Zeit bis zu messbaren Ergebnissen.
Unser Ansatz
Wir haben unseren Fast PoC-Ansatz entwickelt, um die Lücke zwischen Simulation und Realität auf kontrollierte, wiederholbare und geschäftsorientierte Weise zu schließen .
Durch die Wiederverwendung hochpräziser digitaler Zwillinge als Entscheidungs-, Schulungs- und Validierungsumgebungen stellen wir sicher, dass das, was in der Simulation funktioniert, einen klaren Weg in die Praxis findet.
Unser Fokus liegt nicht auf Demos, sondern auf Machbarkeitsnachweisen, die den Anforderungen der realen Welt standhalten .
Was wir liefern
Übergang von der Simulation zur Hardware
Wir gehen von validierten Simulationskonzepten aus und
- Verwenden Digitale Zwillingsmodelle für die Reglerabstimmung und Systemvalidierung wieder,
- Übertragen Wahrnehmungs-, Planungs- und Lernprozesse direkt auf die Hardware,
- Validieren vor dem physischen Test Grenzfälle und Fehlerszenarien.
Die Simulation bleibt während des gesamten Machbarkeitsnachweises ein aktiver Bestandteil der Entwicklung – sie ist kein einmaliger Schritt.
Schnelle Vor-Ort-PoC-Implementierung
Wir setzen Physical AI-Systeme vor Ort ein mit
- Ausgewählte Roboter, Sensoren und Infrastruktur
- Minimale Beeinträchtigung des laufenden Betriebs
- Kontrollierte Testszenarien und Sicherheitsgrenzen
Dies ermöglicht es den Beteiligten , das tatsächliche Systemverhalten frühzeitig zu beurteilen , anstatt auf ein „fertiges“ Produkt zu warten.
Hardware-in-the-Loop & Iterative Validierung
Wir kombinieren
- Hardware-in-the-Loop (HIL)-Test
- Feedback zu realen Daten (Sim2Real2Sim)
- Kontinuierlicher Vergleich mit Simulationsergebnissen
Diese Schleife ermöglicht schnelle Iterationen bei gleichzeitiger Aufrechterhaltung der Rückverfolgbarkeit und Kontrolle über das Systemverhalten.
Typische Anwendungsfälle
- Validierung neuer Automatisierungs- oder Physical AI-Konzepte
- Unternehmensweite Forschungs- und Entwicklungs- sowie Innovationsprogramme
- EU-finanzierte oder öffentlich geförderte F&E-Projekte
- Bewertung neuer Roboter, Sensoren oder Steuerungsstrategien
- Übergang von Pilot- zu Produktionssystemen
Informieren Sie sich über unsere Dienstleistungen und Produkte .
Warum Proximity Robotics
- Simulation steht an erster Stelle, aber die Realität steht im Vordergrund.
- Umfassende Expertise in den Bereichen Physical AI, Steuerung, Wahrnehmung und Sicherheit
- Hersteller- und hardwareunabhängig
- Fundierte Erfahrung in der Überführung von Forschungsergebnissen in einsetzbare Systeme
- Erfahrung in den Bereichen Industrie, Logistik und sicherheitskritische Umgebungen
Für uns ist Simulation kein Visualisierungswerkzeug – sie ist ein Entscheidungsinstrument, eine Trainingseinrichtung für Physical AI und eine Evaluierungsplattform.
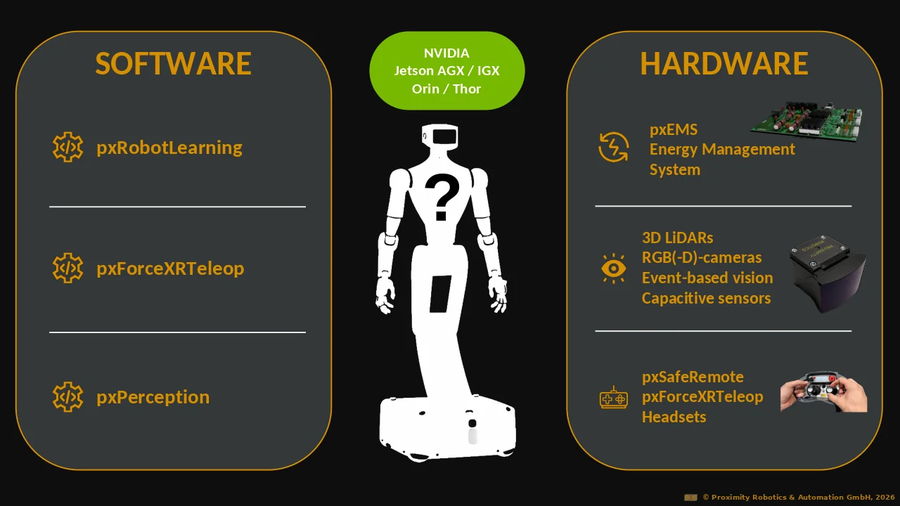
Ermöglicher
Diese Lösung wird durch einen eng integrierten Stack ermöglicht, der hochpräzise Simulationen, skalierbare Trainingspipelines für Physical AI und eine beschleunigte Bereitstellung am Edge kombiniert:
- NVIDIA Omniverse Isaac Sim & Isaac Lab
- pxRobotLearning (IL & RL)
Durchgängige Pipelines für Datenerfassung, Imitationslernen, Reinforcement Learning, Benchmarking und Inferenz – entwickelt für den nahtlosen Übergang von der Simulation zur realen Hardware. - NVIDIA Jetson AGX Orin / Thor
Beschleunigte Edge-Computing-Plattformen ermöglichen latenzarme Wahrnehmung, Steuerung und Physical AI-Inferenz direkt auf dem Roboter. - ROS 2
Souveräne Physical AI und Robotik
Da Roboter intelligent, vernetzt und autonom werden, entwickeln sie sich auch zu Datenproduzenten, Entscheidungsträgern und sicherheitsrelevanten Systemen .
Viele Organisationen sehen sich wachsenden Problemen gegenüber:
- Sensible Betriebsdaten werden in intransparenten Cloud-Diensten verarbeitet.
- Abhängigkeit von ausländischen Anbietern für KI-Modelle und Updates
- Unklare Eigentumsverhältnisse an trainierten Modellen und generierten Daten
- Regulatorischer Druck in Bezug auf Datenschutz, Sicherheit und Cybersicherheit
- Risiko der Anbieterabhängigkeit auf KI- und Kontrollebene
In sicherheitskritischen, industriellen, medizinischen und öffentlichen Umgebungen sind Vertrauen, Transparenz und Kontrolle nicht mehr optional.
Wir sind der Ansicht , dass Physical AI gemäß Ihren Regeln einsetzbar sein muss:
- Sie entscheiden, wo Daten verarbeitet und gespeichert werden.
- Sie bestimmen, welche Modelle auf Ihren Robotern laufen.
- Sie behalten das Eigentum an Ihren Daten, Modellen und dem Systemverhalten.
Souveräne Physical AI beschränkt nicht die Hardwareauswahl. Es geht darum , die Intelligenzebene Ihres Robotersystems zu besitzen und zu kontrollieren .
Wir ermöglichen es unseren Kunden, Roboter und Komponenten internationaler Zulieferer einzusetzen und gleichzeitig sicherzustellen, dass Wahrnehmung, Steuerung und Entscheidungsfindung in Ihrer Hand bleiben .
Die Hardware kann von überall herkommen.
Die Intelligenzebene gehört Ihnen!

Was wir liefern
Hardwareunabhängige Integration
Wir integrieren Roboter und Komponenten von internationalen Zulieferern, während wir:
- Onboard-Rechen- und Kommunikationspfade überprüfen und validieren,
- Obligatorischer Cloud-Abhängigkeiten, wo erforderlich, entkoppeln,
- Eine klare Trennung zwischen Hardwaretreibern und Systemintelligenz schaffen.
Dies ermöglicht es Ihnen, globale Hardwareplattformen einzuführen, ohne die Kontrolle über die Architektur aufzugeben.
Vertrauenswürdige Robotersteuerung (HLC)
Wo erforderlich, integrieren wir unseren eigenen High-Level-Controller auf Basis von:
- NVIDIA Jetson (AGX|IGX) (Orin|Thor)
Wir setzen hochmoderne Robotersteuerungs- und KI-Systeme ein, die …
- Open-Source-basiert,
- Eigentum des Kunden,
- Feinabgestimmte Fundamentmodelle, die an Ihre Aufgaben angepasst sind
Dadurch wird sichergestellt, dass die Entscheidungslogik transparent, nachvollziehbar und unter Ihrer Kontrolle bleibt .
Souveräne Physical AI-Architekturen
Wir entwickeln und implementieren Physical AI-Systeme, die Folgendes ausführen können
- Vollständig vor Ort
- In EU-gehosteten Cloud-Umgebungen
- Oder in Hybridarchitekturen, die auf Ihre Compliance-Anforderungen zugeschnitten sind.
Wir können sicherstellen, dass
- Betriebsdaten niemals Ihre definierte Infrastruktur verlassen,
- Training, Inferenz und Protokollierung sind vollständig nachvollziehbar sind,
- Modellaktualisierungen und -nachschulungen gemäß Ihren Governance-Regeln erfolgen.
Compliance-bewusste Bereitstellung
Unsere Systeme sind unter Berücksichtigung folgender Aspekte konzipiert:
- Industrielle Sicherheitsstandards
- Anforderungen an die Cybersicherheit
- Datenschutz- und Governance-Rahmen
Dieser Ansatz reduziert das Risiko bei Audits, Zertifizierungen und behördlichen Prüfungen. Für diese Phasen vermitteln wir Ihnen gerne vertrauenswürdige Partner, die auf Sicherheit und Cybersicherheit spezialisiert sind.
Warum Proximity Robotics
- Verwurzelt in Europa, mit globaler Technologieexpertise und einem breiten internationalen Partnernetzwerk
- Umfassende Erfahrung in der Robotik und im KI-Einsatz
- Von Grund auf hersteller- und cloudunabhängig.
- Nachgewiesene Fähigkeit, Forschungsergebnisse in robuste industrielle Systeme umzusetzen
Wir verlangen von Ihnen nicht, einer Blackbox zu vertrauen.
Wir entwickeln Physical AI-Systeme, die Sie besitzen, überprüfen und kontrollieren können.
Ermöglicher
- Offene und standardisierte Fundamente
Open-Source-Simulation und -Training (NVIDIA Isaac Sim, Isaac Lab), offene VLA-Modelle und offene Standardformate (URDF, OpenUSD) für Transparenz und langfristige Unabhängigkeit ( Lernbasierte Robotik ) - Expertise in Sicherheit und Cybersicherheit
Partnerschaften mit führenden Experten zur Gewährleistung konformer, robuster und vertrauenswürdiger Physical AI-Systeme - Produktionsreife KI- und Robotik-Plattform
ROS 2, DDS, ONNX/TensorRT und die hardwarebeschleunigten Stacks von Proximity Robotics für zuverlässigen Edge-Einsatz ( Physical AI Tooling )
High-Precision Sensor-Based Sorting
Industrial sorting systems are increasingly challenged by lightweight, irregularly shaped and fast-moving materials. In conventional sensor-based sorting, objects are typically detected at one point in time and separated later by air jets or other actuators. Between detection and actuation, however, objects may change their trajectory due to shape, density, air resistance, vibration or uneven transport conditions. This leads to missed detections, inaccurate separation and reduced material purity.
Proximity Robotics develops event-based vision and real-time object tracking solutions that address this limitation directly. Instead of relying only on a single detection event, the system continuously tracks object motion with an event-based camera and predicts the correct actuation timing with very low latency. This enables sorting systems to react to the actual trajectory of each object rather than assuming constant motion.

Why it matters for machine builders
For equipment manufacturers, recycling technology providers and system integrators, this creates a path toward more robust and adaptive sorting machines. The technology can support higher sorting precision, improved handling of lightweight or aerodynamically unstable objects, and reduced dependence on mechanically perfect material flow. It is especially relevant for applications in recycling, food processing, bulk material handling and quality control.
The approach is designed for integration into existing and future sorting architectures. It can be combined with line-scan cameras, material classification systems, air-jet arrays, vibration feeders and other industrial sorting components. The core idea is simple: classification determines what should be separated, while event-based tracking determines where and when the object should be separated.
98.2% Sorting Accuracy Demonstrated:
- Mean ejection accuracy of 98.2% in the most demanding test setup
- Tested with six material classes including wheat, coffee beans, plastic pellets, plastic flakes, peanut shells and foam
- Clear improvement over simulated line-scan reference performance of 57.3%
- Designed to improve material purity and reduce false ejections
Track the Object, Not the Assumption
- Continuous trajectory tracking instead of one-time object detection
- Compensates for irregular motion, bouncing, slipping and unstable flight paths
- Especially effective for lightweight or aerodynamically unpredictable materials
- Reduces reliance on fixed-speed assumptions in the material flow
4 ms Low-Latency Tracking
- Event-based tracking with an effective system latency of 4 ms
- Enables precise timing of air-jet or actuator activation
- Suitable for fast-moving objects and high-throughput sorting processes
- Typical measured latencies around 2 ms under practical event rates
Better Handling of Difficult Materials
- Developed for materials with irregular shape, density and motion behavior
- Strong benefit shown for foam pieces and plastic flakes
- Helps separate objects that are difficult to predict with conventional line-scan systems
- Relevant for recycling, food processing and bulk material sorting
Less Mechanical Preconditioning
- Reduces dependency on perfectly uniform transport speeds
- Helps compensate for object-specific motion deviations in real time
- Can lower the need for complex mechanical flow homogenization
- Supports more flexible machine layouts and material handling concepts
Built for Existing Sorting Architectures
- Designed to work with line-scan cameras, classifiers, air-jet arrays and vibration feeders
- Event-based tracking complements existing material classification systems
- Can be adapted to different machine layouts, sensor positions and actuator configurations
- Suitable for retrofitting concepts and next-generation sorting machines
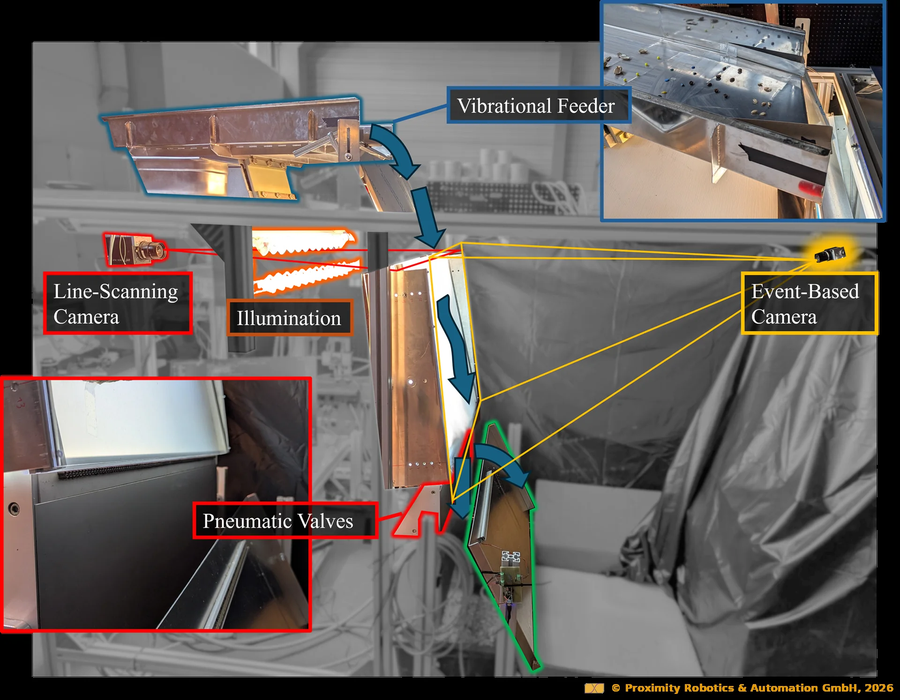
Demonstrated performance in the GRIZZLY project
Within the GRIZZLY research project, Fraunhofer IOSB and Proximity Robotics developed and validated a functional lab demonstrator for event-based object tracking in sensor-based sorting. The system combines line-scan camera classification with low-latency event-based tracking and multi-rate sensor fusion.
In systematic sorting experiments with six material classes, including wheat, coffee beans, plastic pellets, plastic flakes, peanut shells and foam pieces, the event-based tracking approach achieved a mean ejection accuracy of 98.2% in the most demanding activation window. This was compared against 57.3% for a simulated line-scan reference system and 88.7% for a frame-based tracking approach.
The strongest benefit was observed for materials with irregular flight behavior, where classical line-scan approaches can fail due to fixed motion assumptions. The developed event-based system reached an effective tracking latency of 4 ms, enabling precise actuator timing even under dynamic object motion.
From research demonstrator to industrial solution
The GRIZZLY demonstrator shows how event-based vision can become a practical enabling technology for next-generation sorting systems. The developed software modules for calibration, multi-rate sensor fusion and real-time event tracking are modular and can be adapted to different machine layouts, actuator configurations and sensor combinations.
For machine builders and industrial partners, Proximity Robotics offers the know-how to evaluate, adapt and integrate event-based tracking into application-specific sorting concepts. This includes feasibility studies, demonstrator development, sensor and actuator integration, latency analysis, performance evaluation and support for transitioning from lab validation to industrial pilot systems.
Technology background
This solution builds on the results of the GRIZZLY research project, funded under the DATIpilot program and carried out together with Fraunhofer IOSB. More technical details, project background and visual material are available on the GRIZZLY research page: