能量感知人形机器人
面向节能型人形机器人的无线动态充电
人形机器人正迅速崛起,成为包括工业制造、物流、医疗保健、教育和服务机器人等众多应用领域的变革性技术。随着这些系统自主性不断增强,并能实现复杂的全身运动,它们对先进感知模块、嵌入式人工智能计算和多自由度驱动的依赖性也日益增长。这种发展导致能耗显著增加且变化剧烈。因此,确保持续运行、最大限度地减少停机时间并保持能源效率,是人形机器人在智能工厂、仓库和医院等实际环境中部署所面临的根本挑战。

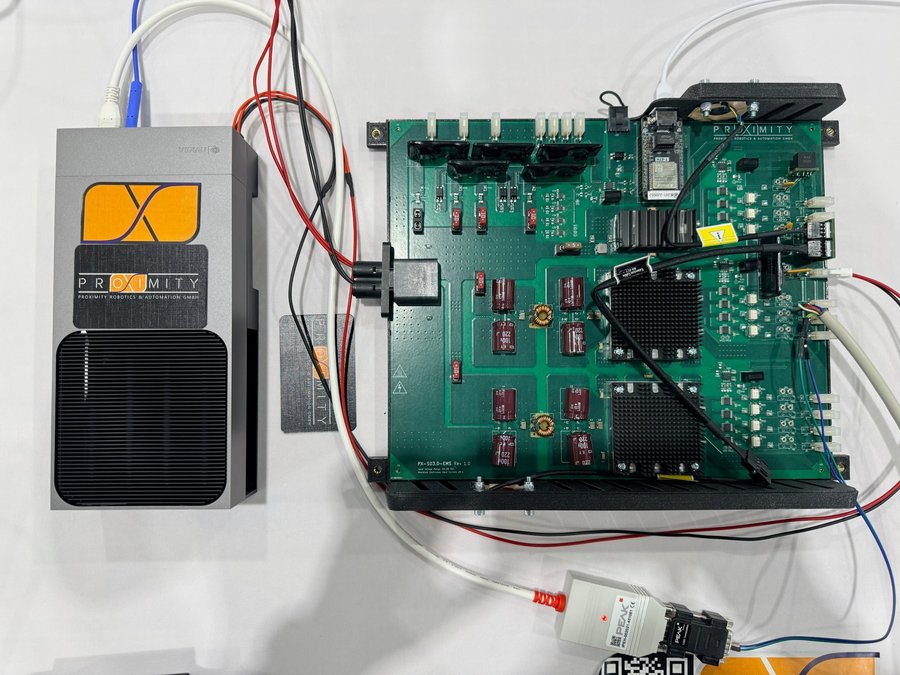
- 用于人形机器人能量分析的pxEMS
- 可持续机器人技术
- 利用数字孪生进行参数优化
- 无线物理传输的机器人任务优化
- 基于强化学习的能量约束运动生成
我们专注于:
人形机器人不间断运行
- 机器人持续供电:无需依赖手动更换电池或固定式对接站,即可实现人形机器人的持续运行。
- 持续能源管理:从离散的充电周期转向持续的、学习驱动的能源优化,以最大限度地减少停机时间。
- 移动性和能量摄入的联合优化:在统一的控制框架内平衡运动稳定性、任务性能和能量收集。
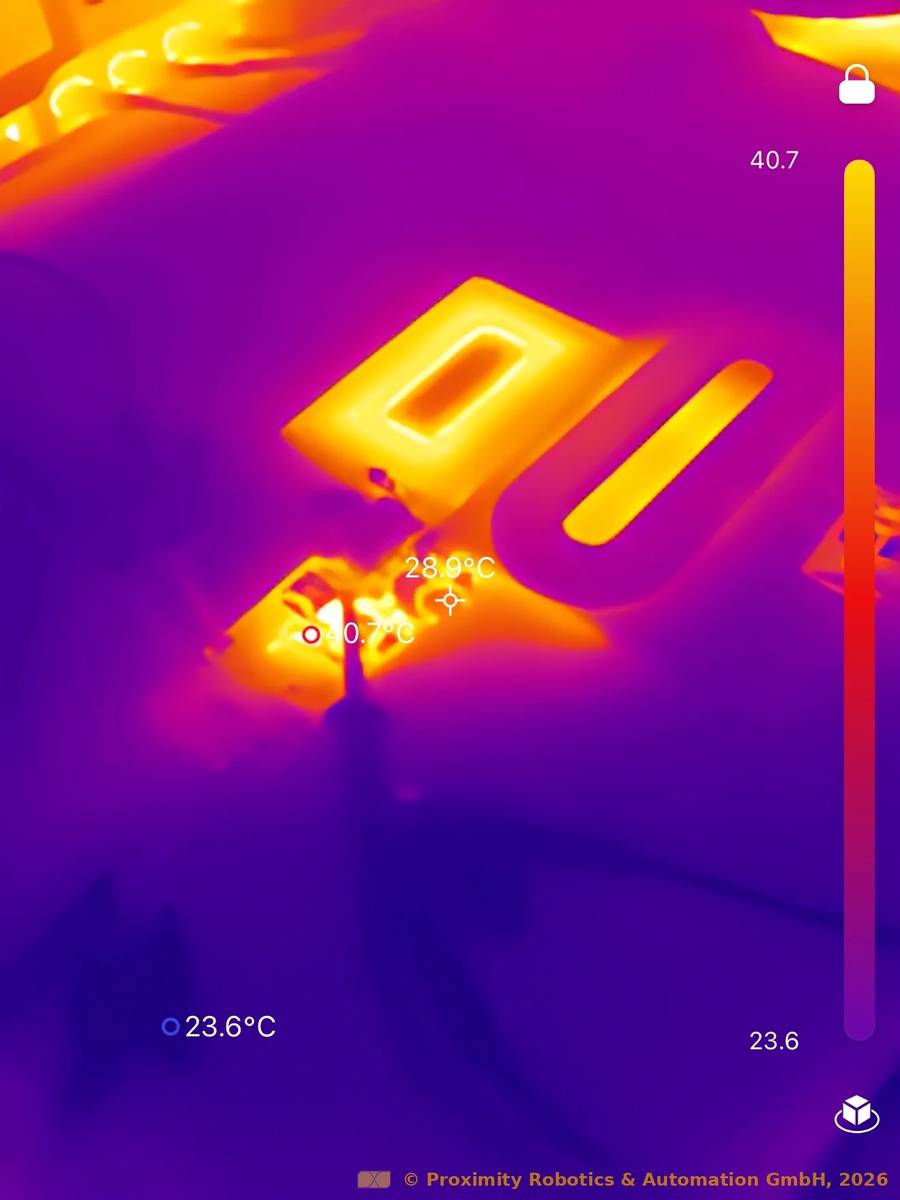
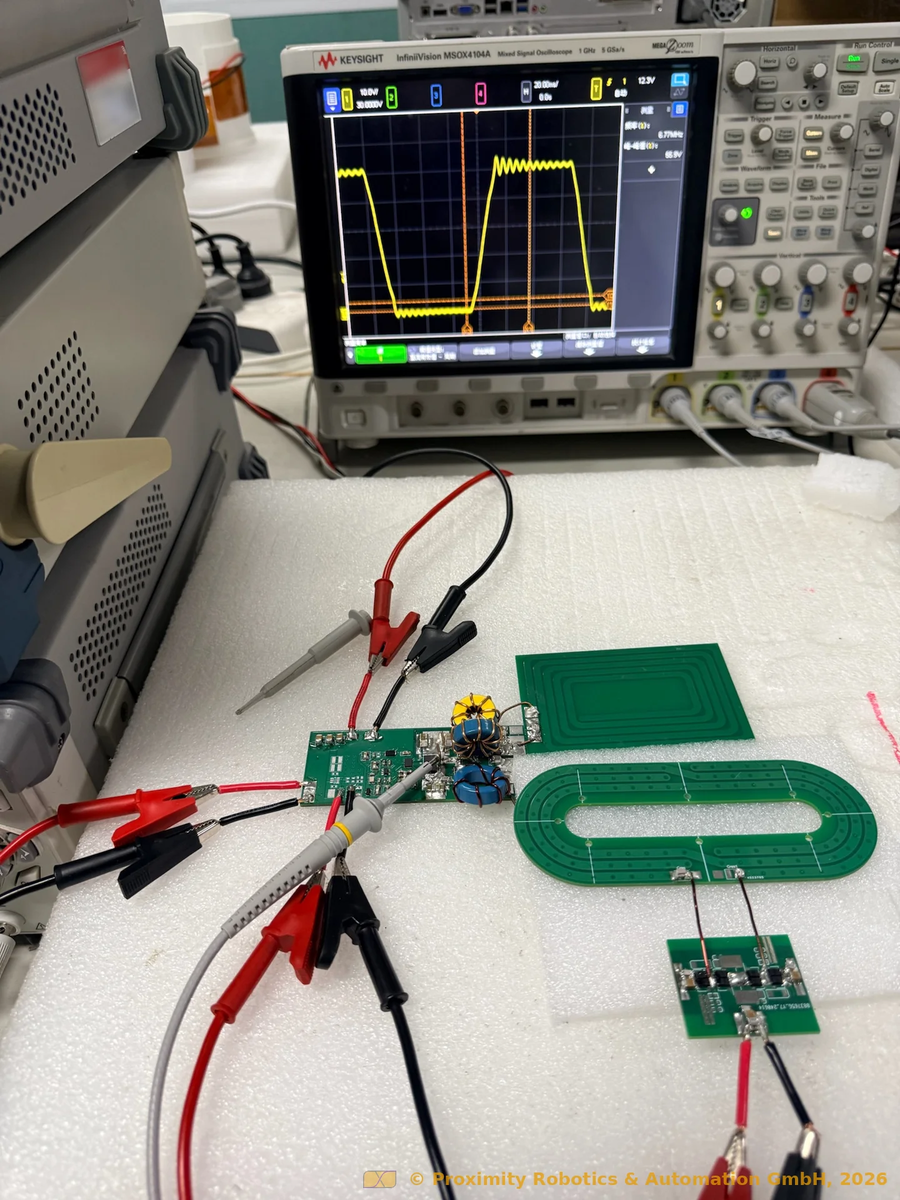
无线电力传输(WPT)
- MHz 范围无线电力传输 (6.78 MHz) :与传统的 kHz 范围方法相比,高频 WPT 可实现紧凑、轻便和高功率密度的充电系统。
- 减小充电硬件的尺寸和重量:消除笨重的铁氧体材料,从而制造出机械强度高且与人形机器人兼容的充电模块。
- 动态充电:支持在行走、站立或执行任务时进行无线能量传输,无需精确对接。
节能控制策略
- 基于强化学习的运动适应:利用强化学习来调整步态、姿势和足部位置,以提高运动过程中的充电效率。
- 充电模块感知运动优化:将 WPT 发射器的空间分布直接集成到运动策略中,使机器人能够利用高效区域。
- 节能充电策略:从控制的角度优化充电,而不是将其视为一个单独的子系统。
基础设施一体化能源系统
- 环境一体化充电基础设施: 将WPT发射器嵌入地板和工作空间,从而在正常运行期间实现机会性能量补充。
- 无缝能源整合: 整合基础设施和机器人智能,创建合作能源生态系统
- 基础设施级能源协调:协调多个嵌入式 WPT 模块,根据机器人位置、需求和任务优先级动态分配充电容量。
电池更换可延长运行时间——无线电力传输可实现连续运行。
将您的人形机器人平台升级为不间断、节能型运行。联系我们,探索更多可能性。
也适用于移动机器人系统。
Partners