CogniSafe3D
通过CogniSafe3D项目,我们正在弥补确定性工业安全与人工智能驱动机器人技术的灵活性之间的差距。
现代机器人系统越来越依赖深度学习和自适应行为。然而,工业安全标准要求其行为具有确定性且可认证。这就造成了一个根本性的冲突:非确定性的人工智能系统必须在确定性的安全框架内运行。
传统安全系统通常依赖于 2D 传感技术,强制执行保守的速度限制或触发频繁停车——降低生产力并限制真正的协作。
CogniSafe3D 通过引入认知型 3D 安全架构来应对这一挑战,该架构将确定性安全保障与人工智能增强的环境理解相结合。其目标是在不牺牲效率的前提下,实现自适应的、可认证的安全保障。
CogniSafe3D 利用外部高分辨率3D 激光雷达监控共享工作空间,并构建分层安全理念:
- 确定性基础
- 认知层
确定性基础
- 利用有符号距离场(SDF)处理三维点云
- 可靠、安全等级高的违规检测
- 确定性空间安全边界强制执行
- 独立于人工智能组件的实时风险监控
该基础确保符合现行安全标准,并提供可认证的基准行为。
认知层
- 基于人工智能的人体姿态估计(HPE)
- 用于预测人类意图和运动的预测算法
- 情境感知风险评估
- 机器人行为的动态调整
认知层通过在危险发生之前预测危险来增强确定性核心。
CogniSafe3D 目标:
- 功能安全:设计并验证符合 ISO 10218:2025 和 ISO/TS 15066 标准的可认证安全架构
- 网络安全:设计并集成符合 ISA/IEC 62443 标准的网络安全机制,以确保互联机器人系统在工业环境中安全、稳定地运行。
- 可扩展地集成到基于 ROS 2 的机器人系统中
工业影响
- 解决了人工智能驱动的灵活性与可认证的安全要求之间的冲突
- 通过预测性风险评估减少不必要的紧急停车
- 提高共享办公空间的工作效率
- 从被动停工转向主动风险缓解
资金致谢CogniSafe3D 项目 (E! 6085) 获得德国联邦研究、技术和空间部 (BMFTR) 和意大利大学和研究部 (MUR) 的 Eureka-Eurostars 计划资助。
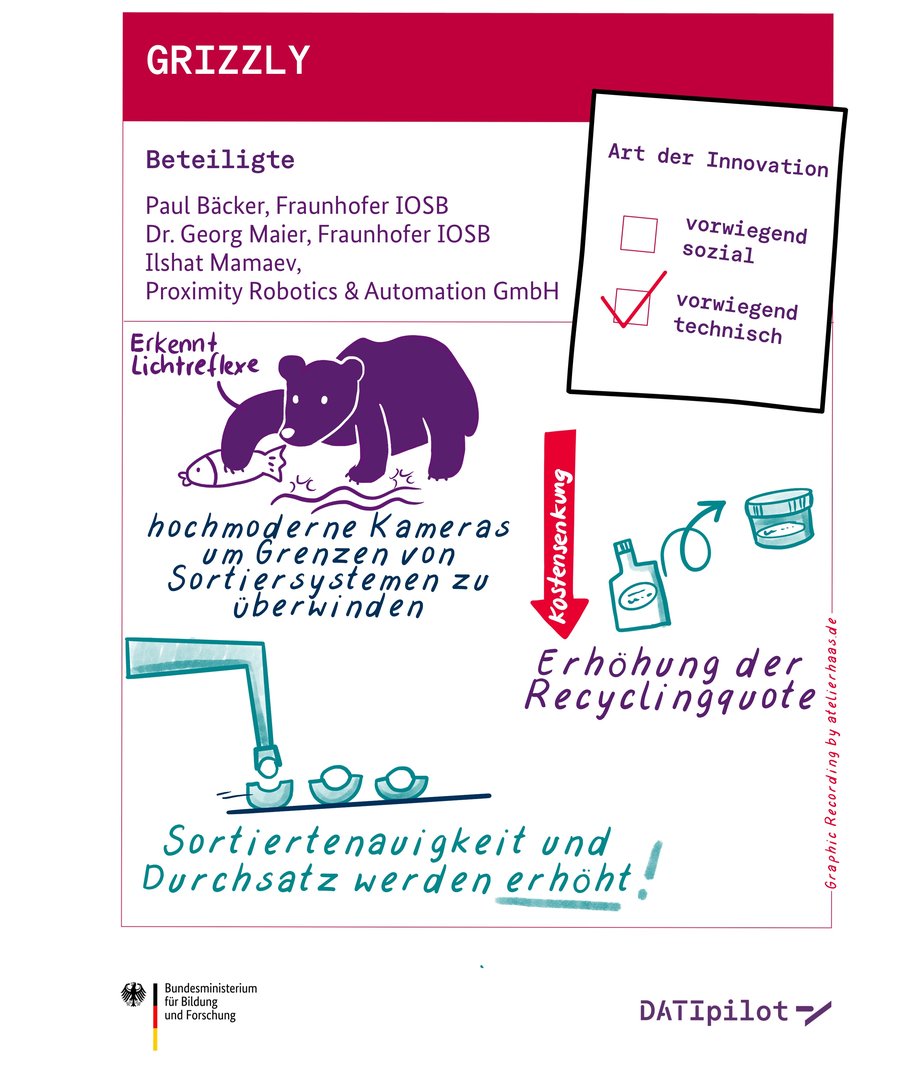
GRIZZLY (灰熊)
基于事件的精准回收和可持续发展愿景。
GRIZZLY结合基于事件的 3D 物体跟踪和高光谱材料分类技术,开发出新一代基于传感器的分拣系统。该项目旨在解决当前分拣系统的一个根本性局限:物体在检测和分离过程中会发生移动,从而降低精度和效率。
GRIZZLY系统融合了用于分类的线扫描高光谱相机和用于实时跟踪的新型事件驱动视觉系统,实现了精确的轨迹预测和自适应执行器控制。其结果是提高了回收和材料加工的分类精度、处理效率,并降低了能耗。
该项目由Fraunhofer IOSB和Proximity Robotics & Automation GmbH在 DATIpilot 计划 (BMFTR) 下开展。
技术创新
- 基于事件的飞行物体实时三维跟踪
- 高光谱分类与运动跟踪的融合
- 无延迟回溯,实现精确的执行器定时
- 低延迟数据处理,降低计算负荷
- 实时验证分拣准确性
工业相关性
- 提高分选准确率和纯度
- 不同运输速度下更高的吞吐量
- 降低分离单元的能耗
- 改进对轻质复杂材料的处理
- 可扩展地集成到现有分拣系统中
研究重点
- 事件驱动型摄像机的校准与优化
- 实时跟踪算法开发
- 工业条件下的传感器融合(灰尘、振动、光照变化)
- 对整个激活堆栈进行延迟分析
- 证明其优于现有最先进系统
能量感知人形机器人
面向节能型人形机器人的无线动态充电
人形机器人正迅速崛起,成为包括工业制造、物流、医疗保健、教育和服务机器人等众多应用领域的变革性技术。随着这些系统自主性不断增强,并能实现复杂的全身运动,它们对先进感知模块、嵌入式人工智能计算和多自由度驱动的依赖性也日益增长。这种发展导致能耗显著增加且变化剧烈。因此,确保持续运行、最大限度地减少停机时间并保持能源效率,是人形机器人在智能工厂、仓库和医院等实际环境中部署所面临的根本挑战。

- 用于人形机器人能量分析的pxEMS
- 可持续机器人技术
- 利用数字孪生进行参数优化
- 无线物理传输的机器人任务优化
- 基于强化学习的能量约束运动生成
我们专注于:
人形机器人不间断运行
- 机器人持续供电:无需依赖手动更换电池或固定式对接站,即可实现人形机器人的持续运行。
- 持续能源管理:从离散的充电周期转向持续的、学习驱动的能源优化,以最大限度地减少停机时间。
- 移动性和能量摄入的联合优化:在统一的控制框架内平衡运动稳定性、任务性能和能量收集。
无线电力传输(WPT)
- MHz 范围无线电力传输 (6.78 MHz) :与传统的 kHz 范围方法相比,高频 WPT 可实现紧凑、轻便和高功率密度的充电系统。
- 减小充电硬件的尺寸和重量:消除笨重的铁氧体材料,从而制造出机械强度高且与人形机器人兼容的充电模块。
- 动态充电:支持在行走、站立或执行任务时进行无线能量传输,无需精确对接。
节能控制策略
- 基于强化学习的运动适应:利用强化学习来调整步态、姿势和足部位置,以提高运动过程中的充电效率。
- 充电模块感知运动优化:将 WPT 发射器的空间分布直接集成到运动策略中,使机器人能够利用高效区域。
- 节能充电策略:从控制的角度优化充电,而不是将其视为一个单独的子系统。
基础设施一体化能源系统
- 环境一体化充电基础设施: 将WPT发射器嵌入地板和工作空间,从而在正常运行期间实现机会性能量补充。
- 无缝能源整合: 整合基础设施和机器人智能,创建合作能源生态系统
- 基础设施级能源协调:协调多个嵌入式 WPT 模块,根据机器人位置、需求和任务优先级动态分配充电容量。
电池更换可延长运行时间——无线电力传输可实现连续运行。
将您的人形机器人平台升级为不间断、节能型运行。联系我们,探索更多可能性。
也适用于移动机器人系统。
机器人触摸
情感触碰在情绪调节、压力缓解和社会联结中发挥着至关重要的作用。在康复领域,可控的身体互动能够促进运动功能恢复和感觉刺激。尽管人工智能已显著提升了语言和视觉交互能力,但复制有意义的身体互动仍然是一项重大的科学和工程挑战。
该项目探索机器人如何提供令人愉悦、类似人类且具有情感意义的触摸,同时保持精确控制和安全性。
该研究以受控的人体研究为基础,利用 7 自由度机械臂和经过验证的实验方案评估机器人抚摸行为。
机器人触摸研究机器人是否能够重现类似人类的情感触觉,以及空间和时间运动特征如何影响人类的感知。
更多详情,请参阅我们的相关出版物:
近期出版物
我们通过持续的研究、开发和合作,积极推进机器人技术的发展。依托公司深厚的学术背景和长期的国际研究合作关系,我们定期为科学界做出贡献,并在IROS 、 ICRA和CASE等知名期刊上发表论文。
我们的研究涵盖广泛的领域,包括经典控制和基于人工智能的方法(例如模仿学习和强化学习)、双手和双臂操作、碰撞规避以及使用RGB-(D)相机、3D激光雷达、事件驱动相机和电容式传感器的机器人感知。我们将这些方法应用于移动平台、机械臂和人形机器人,并重点关注安全相关的研究,例如主动危险预测、动态风险评估及相关课题。
通过参与研究和教学活动,我们不断更新技术组合,并将国际研发和创新项目的经验转化为实际应用。
出版物列表:
2026
- F. Plahl, G. Katranis, K. Alba, F. Wolny, S. Vock, A. Morozov and I. Mamaev, "OmniABiD: Evaluating Sim2Real Transferability in Safety and Risk Monitoring of Human-Robot Collaboration using NVIDIA Omniverse," in Proc. 17th Eur. Rob. Forum (ERF), 2026, to appear.
2025
- Y. Ma, Z. Jin, Q. Liu, I. Mamaev, and A. Morozov, "Deep Learning-based Proactive Hazard Prediction for Human-Robot Collaboration with Sensor Malfunctions," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025.
- F. Plahl, G. Katranis, I. Mamaev, and A. Morozov, "LiHRA: A LiDAR-based HRI dataset for automated risk monitoring methods," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025.
- Y. Tang, X. Huang, Y. Zhang, T. Chen, I. Mamaev, and B. Hein, "ETA-IK: Execution-time-aware inverse kinematics for dual-arm systems," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025.
- Y. Tang, T. Chen, B. Hein, and I. Mamaev, "Improving feasibility and safety of nonlinear MPC with control barrier function via learning-based non-convex reachable sets," in Proc. IEEE 21st Int. Conf. Autom. Sci. Eng. (CASE), 2025.
- M. Ruhe, K. Alba, M. Kipfmueller, and I. Mamaev, "Simulation-to-reality hyperparameter optimization of MPPI controllers via Bayesian optimization in NVIDIA Omniverse Isaac Sim," in Proc. IEEE 21st Int. Conf. Autom. Sci. Eng. (CASE), 2025.
- Y. Tang, T. Chand, I. Mamaev, B. Hein, and I. Croy, "Evaluation of the human-like robotic touch: A user study," in Proc. Int. Conf. Rehabil. Robot. (ICORR), 2025, pp. 1353–1360.
- G. Katranis, F. Plahl, J. Grimstadt, I. Mamaev, S. Vock, and A. Morozov, "Dynamic risk assessment for human-robot collaboration using a heuristics-based approach," in Proc. 35th Eur. Saf. Reliab. Conf. (ESREL), 2025, pp. 1830–1837.
2024
- Y. Ma, J. Liu, I. Mamaev, and A. Morozov, "Multimodal failure prediction for vision-based manipulation tasks with camera faults," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2024.
- A. Zachariae, F. Plahl, Y. Tang, I. Mamaev, B. Hein, and C. Wurll, "Human-robot interactions in autonomous hospital transports," Robot. Auton. Syst., vol. 179, p. 104755, 2024.
- Y. Tang, I. Mamaev, and B. Hein, "Enhancing logistics automation: Integrating capacitive proximity and tactile sensors for trolley pose and center of mass estimation," in Proc. IEEE 20th Int. Conf. Autom. Sci. Eng. (CASE), 2024.
2023
- Y. Tang, I. Mamaev, J. Qin, C. Wurll, and B. Hein, "Reachability-aware collision avoidance for tractor-trailer system with non-linear MPC and control barrier function," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2023.
- A. A. Attar, T. Fabarisov, A. Morozov, M. Artelt, and I. Mamaev, "Hybrid lightweight deep learning-based error detection model on edge computing devices," in Proc. IEEE 28th Int. Conf. Emerg. Technol. Fact. Autom. (ETFA), 2023, pp. 1–4.
- Y. Tang, W. Shen, I. Mamaev, and B. Hein, "Towards flexible manufacturing: Motion generation concept for coupled multi-robot systems," in Proc. IEEE 19th Int. Conf. Autom. Sci. Eng. (CASE), 2023.
- M. Käppler, I. Mamaev, H. Alagi, T. Stein, and B. Deml, "Optimizing human-robot handovers: The impact of adaptive transport methods," Front. Robot. AI, vol. 10, p. 1155143, 2023.
2022
- T. Fabarisov, A. Morozov, I. Mamaev, and P. Grimmeisen, "Fidget: Deep learning-based fault injection framework for safety analysis and intelligent generation of labeled training data," in Proc. IEEE 27th Int. Conf. Emerg. Technol. Fact. Autom. (ETFA), 2022, pp. 1–6.
- Z. Gyenes, I. Mamaev, D. Yang, E. G. Szádeczky-Kardoss, and B. Hein, "Motion planning for mobile robots using the human tracking velocity obstacles method," in Proc. Int. Conf. Inform. Control Autom. Robot. (ICINCO), 2022, pp. 484–491.
- X. Ye, W. Shen, I. Mamaev, T. Bertram, M. Bryg, M. Schwartz, S. Hohmann, T. Asfour, B. Hein, M. Kipfmueller, J. Kotschenreuther, "Multi-level optimization approach for multi-robot manufacturing systems," in Proc. 54th Int. Symp. Robot. (ISR Europe), 2022, pp. 1–8.
2021
- T. Fabarisov, A. Morozov, I. Mamaev, and K. Janschek, "Deep learning-based error mitigation for assistive exoskeleton with computational-resource-limited platform and edge tensor processing unit," in Proc. ASME Int. Mech. Eng. Congr. Expo. (IMECE), 2021.
- Y. Tang, I. Mamaev, H. Alagi, B. Abel, and B. Hein, "Collision avoidance for mobile robots using proximity sensors," in Interactive Collaborative Robotics (ICR), 2021, pp. 205–221.
- I. Mamaev, D. Kretsch, H. Alagi, and B. Hein, "Grasp detection for robot to human handovers using capacitive sensors," in Proc. IEEE Int. Conf. Robot. Autom. (ICRA), 2021, pp. 12552–12558.
2020
- M. Eckstein, I. Mamaev, B. Ditzen, and U. Sailer, “Calming Effects of Touch in Human, Animal, and Robotic Interaction—Scientific State-of-the-Art and Technical Advances,” Frontiers in Psychiatry, vol. 11, 2020, Art. 555058, doi:10.3389/fpsyt.2020.555058
- T. Fabarisov, I. Mamaev, A. Morozov, and K. Janschek, “Model-based Fault Injection Experiments for the Safety Analysis of Exoskeleton System,” in 30th European Safety and Reliability Conference (ESREL 2020), 2020.
- 正在寻找中小企业研究合作伙伴?请联系我们。