Omniverse Atelier
Omniverse Atelier是我们提供的仿真和数字孪生工程服务,用于在高保真虚拟环境中开发、验证和优化机器人系统和流程。它围绕两个互补的视角构建:机器人和流程:
- 带上您自己的机器人 (Bring Your Own Robot)专注于将机器人、组件和传感器转化为高保真、可用于仿真的数字孪生体。
- 带上您自己的工作流程 (Bring Your Own Process)侧重于在模拟中复制真实的操作工作流程和环境,而与任何特定的机器人无关。
最终,这两种视角在 NVIDIA Omniverse 中融合在一起,形成一个单一的、可重用的数字孪生体,支持决策制定、概念验证和长期优化。


带上您自己的机器人
我们将您的机器人或组件设计转化为可用于仿真的资源:
- 将 CAD 模型转换为OpenUSD 和 URDF/xacro 格式
- 针对物理模拟和照片级真实感渲染优化的高保真资产
- 传感器、关节和ros2_control接口的集成
- 与 NVIDIA Omniverse Isaac Sim / Isaac Lab 的兼容性
这样就可以在模拟和训练流程中对机器人、末端执行器、传感器或组件进行一致的评估、展示和测试。
带上您自己的工作流程
我们通过高保真模拟来复制和优化您的真实世界工作流程:
- 工作单元、生产线、仓库和运营环境的建模
- 流程逻辑、物料流和任务执行建模(行为树)
- 与 ROS 2、中间件平台和传感器配置集成
- 无需物理硬件即可测试自动化概念
- Hardware-in-the-Loop 测试
这样就可以在不中断实际运营的情况下,快速进行迭代、可行性研究和优化。
典型应用案例
- 自动化可行性研究
- 机器人、组件和布局的评估
- 基于数字孪生的供应商基准测试
- 部署前的流程优化
- 教学和研究实验
Omniverse Atelier 的功能
- 先模拟后决策
- 数字孪生技术可用于研发、概念验证和部署等各个阶段。
- 对机器人和自动化解决方案进行厂商中立的评估
- 可复现的仿真到实际工作流程
- 将数字孪生体作为动态资产进行长期再利用
基于学习的机器人技术
基于学习的机器人技术是我们利用数据驱动和基于学习的方法来开发、训练和验证机器人系统的服务。除了经典的模仿学习和强化学习之外,我们还支持对基础模型(包括视觉-语言-动作 (VLA)模型和其他开源模型)进行适配和微调,以适应特定的环境和应用。
该服务以仿真优先开发为基础,涵盖了完整的学习生命周期——从数据生成和模型调整到基准测试和在真实机器人上部署——并着重关注稳健性、可重复性和实际应用性。
数据生成与收集
- 高保真数据集生成( pxRobotLearning )
支持在仿真和物理机器人上生成大规模数据集,确保合成数据和真实世界数据分布的一致性。 - 远程操作和人机交互数据采集( pxTeleopForceXR )
通过远程操作界面、可穿戴设备和交互式控制实现数据收集,使人类能够在任务执行过程中进行指导、纠正和干预。 - 多模态数据支持
收集同步的视觉、点云、本体感觉、力和任务级信号,用于基于学习的机器人技术。 - 结构化和版本化的数据集
提供带有元数据的标准化数据集格式,从而实现可重复的训练、基准测试和长期评估。
学习与模型适应
- 集成式IL和RL管道
提供端到端的模仿学习和强化学习工作流程,支持演示驱动学习和交互驱动学习。 - 基础模型的微调
将预训练的基础模型适配到机器人特定任务、约束和传感器模式。 - 视觉-语言-动作模型适应
根据客户特定环境、任务语义和操作工作流程对 VLA 模型进行微调。 - 开放式一体化
支持在统一的训练框架内集成和扩展开源学习和感知模型。
基准测试与验证
- 基于仿真的性能基准测试
在受控、可重复的模拟场景下评估学习效果。 - 仿真到实际验证和仿真到仿真验证
评估策略在不同模拟器中以及转移到真实硬件过程中的稳健性。 - 压力测试和极端情况评估
验证在干扰、传感噪声、动态障碍物和罕见故障情况下的行为。 - 定量指标和日志记录
提供对政策稳定性、任务成功率和安全约束的系统性评估指标。
部署与推理
- 模型导出和优化
支持模型转换、压缩和优化,以便在边缘和嵌入式平台上部署。 - 基于 ROS 2 的系统集成
将训练好的模型无缝集成到 ROS 2 感知、规划和控制流程中。 - 机器人加速推理
能够在配备 GPU 或加速器的机器人硬件上进行实时推理,并实现确定性执行。
典型应用案例
- 基于学习的操作和导航
制定抓取、操作、运动和自主导航策略。 - 人机交互与辅助
利用人类输入、语言指令和反馈来训练交互式行为。 - 算法基准测试与评估
在标准化条件下对学习算法进行比较评价。 - 研究和工业研发项目
工业机器人应用(例如WPT 项目)的应用研究、原型开发和技术验证。
系统集成与改造
系统集成与改造专注于将机器人系统引入实际运行环境——包括将现有车辆、机器和基础设施改造为自动化或自主系统。
许多自动化项目并非从零开始。现有的车辆、工作流程和基础设施必须被安全地重新利用、调整和集成。这项服务旨在延长现有系统的使用寿命和功能,同时最大限度地减少中断和投资风险。
现有系统的改造
- 将手动或半自动车辆(例如,AGV)改装成自主移动机器人
- 现有机械平台和基础设施的再利用和改造
- 集成额外的传感器、计算和控制组件
基于 ROS 2 的系统集成
- 将异构硬件集成到ROS 2生态系统中
- 中间件配置和系统编排
- 模块化架构便于维护和未来扩展
- 工业和现场总线协议,包括CAN、CANopen、EtherCAT、OPC UA 和基于以太网的协议
调试与现场验证
- 现场安装和调试
- 在实际运行条件下进行受控测试
- 早期运营阶段的迭代改进
- 运营商和利益相关者验证
- 文档和交接支持
典型应用案例
- 将AGV改装为AMR
- 将机器人技术引入现有仓库或工厂
- 内部运输和物流自动化
- 将机器人集成到智能建筑和设施中
控制与优化
控制与优化是我们提供的服务,旨在设计、调整和验证机器人在现实世界约束下的运动和控制,重点在于可靠性、安全性和效率。
我们将经典的控制方法与现代优化和基于学习的技术相结合,采用仿真优先验证,以确保控制策略在部署到真实机器人上时保持稳定和可预测性。
这项服务是为需要在生产环境中实现稳健运行的团队设计的,在这些环境中,安全裕度、动态障碍和资源限制都至关重要。
控制设计与调优
- 经典控制器和高级控制器(PID、MPC、MPPI、特定任务控制器)
- 利用仿真和优化方法进行控制器参数化和整定
- 稳定性、稳健性和重复性验证
运动规划与碰撞避免
- 全局和局部运动规划
- 移动机器人、机械臂和多机器人系统的碰撞避免
- 考虑人类和约束的规划策略
系统级优化
- 优化轨迹、任务执行和运动效率
- 在受限环境下进行吞吐量和性能优化
- 利用真实测量数据进行节能优化( pxEMS )
基于仿真的验证
- 数字孪生中控制和规划策略的评估
- 在扰动、不确定性和极端情况下进行压力测试
- 部署前对各种控制方法进行比较
典型应用案例
- 移动机器人导航与操控
- 人机协作场景
- 工业和物流流程优化
- 节能运动和任务规划
为什么选择Proximity Robotics?
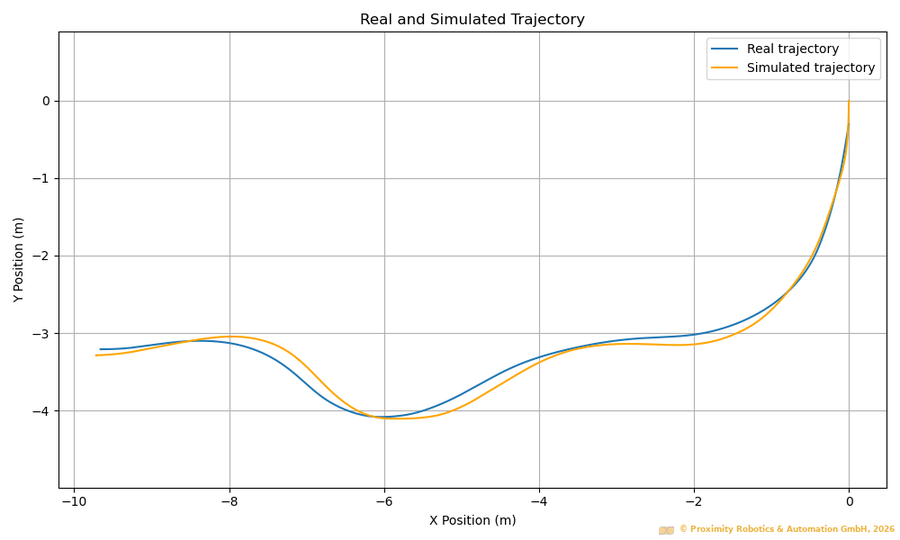
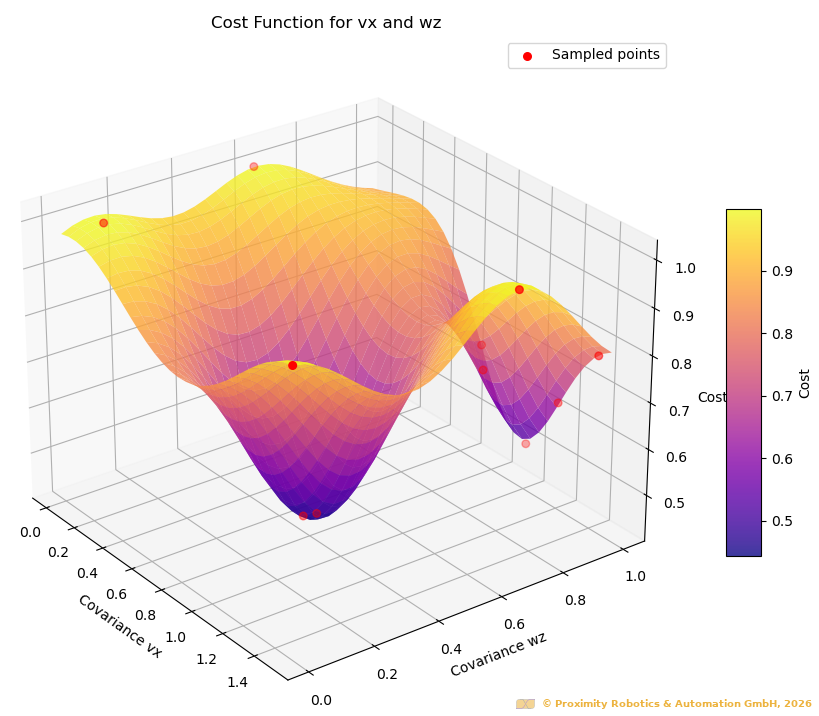
- 基于贝叶斯优化的参数化——数据驱动、高效且可复现
- 轻松与 ROS 2 及现有系统集成——可立即部署到您平台的参数
- 已发表的研究——在 CASE 和 IROS 会议上发表的经同行评审的方法
有关详细技术背景,请参阅我们的相关出版物:
- Y. Tang、X. Huang、Y. Zhang、T. Chen、I. Mamaev 和 B. Hein,“ETA-IK:双臂系统的执行时间感知逆运动学”,载于 IEEE/RSJ 国际智能机器人系统会议 (IROS) 会议录,2025 年。
- Y. Tang、T. Chen、B. Hein 和 I. Mamaev,“通过基于学习的非凸可达集提高具有控制障碍函数的非线性 MPC 的可行性和安全性”,载于 IEEE 第 21 届国际自动化科学与工程会议 (CASE) 会议录,2025 年。
- M. Ruhe、K. Alba、M. Kipfmueller 和 I. Mamaev,“通过 NVIDIA Omniverse Isaac Sim 中的贝叶斯优化实现 MPPI 控制器的仿真到现实超参数优化”,载于 IEEE 第 21 届国际自动化科学与工程会议 (CASE) 会议录,2025 年。
- Y. Tang、I. Mamaev、J. Qin、C. Wurll 和 B. Hein,“具有非线性 MPC 和控制障碍功能的牵引车-拖车系统的可达性感知避障”,载于 IEEE/RSJ 国际智能机器人系统会议 (IROS) 会议录,2023 年。
- Y. Tang、W. Shen、I. Mamaev 和 B. Hein,“迈向柔性制造:耦合多机器人系统的运动生成概念”,载于 IEEE 第 19 届国际自动化科学与工程会议 (CASE) 会议录,2023 年。
- X. Ye、W. Shen、I. Mamaev、T. Bertram、M. Bryg、M. Schwartz、S. Hohmann、T. Asfour、B. Hein、M. Kipfmueller、J. Kotschenreuther,“多机器人制造系统的多级优化方法”,载于第 54 届国际机器人研讨会(ISR Europe)论文集,2022 年,第 1-8 页。
软件工程与 ROS 2 开发
软件工程和 ROS 2 开发专注于设计、实现和维护强大、模块化和可用于生产的机器人软件。
重点在于开发不仅适用于研究或原型制作的软件,而且在整个部署和运行过程中保持可维护性、可扩展性和可靠性。
我们以ROS 2 为基础,结合现代中间件、硬件加速和简洁的软件架构,为长期机器人系统提供支持。
ROS 2 驱动程序和中间件开发
- 开发用于传感器、执行器、控制器和安全设备的ROS 2 驱动程序
- 将异构硬件集成到统一的 ROS 2 系统中
- 根据需要使用DDS 、 ZeroMQ和MQTT配置中间件
控制与系统架构
- ros2_control架构的设计
- 适用于机器人系统的可重用项目模板,涵盖控制、感知和系统编排的常见模式
- 模块化节点和组件结构
- 行为树和基于状态的复杂机器人行为编排
感知与数据管道
- 激光雷达、RGB-D相机、事件驱动型传感器和触觉传感的感知管道
- 实时数据处理和同步
- 将感知输出整合到计划和控制回路中
硬件加速与性能优化
- 使用CUDA 的GPU 加速管线
- 使用ONNX 和 TensorRT进行优化推理
- 在NVIDIA Jetson AGX等边缘平台上高效部署
软件质量与可维护性
- 简洁的 API 和模块化接口
- 版本化配置和可复现的构建
- 长期运营所需的文件记录和交接
- 面向开发团队的研讨会,有助于加快员工熟悉架构,确保架构决策的一致性,并分享最佳实践。
典型应用案例
- 基于 ROS 2 的机器人平台开发
- 集成新的传感器或控制器
- 实时运行性能优化
- 从研究代码到可部署软件的过渡
硬件与嵌入式
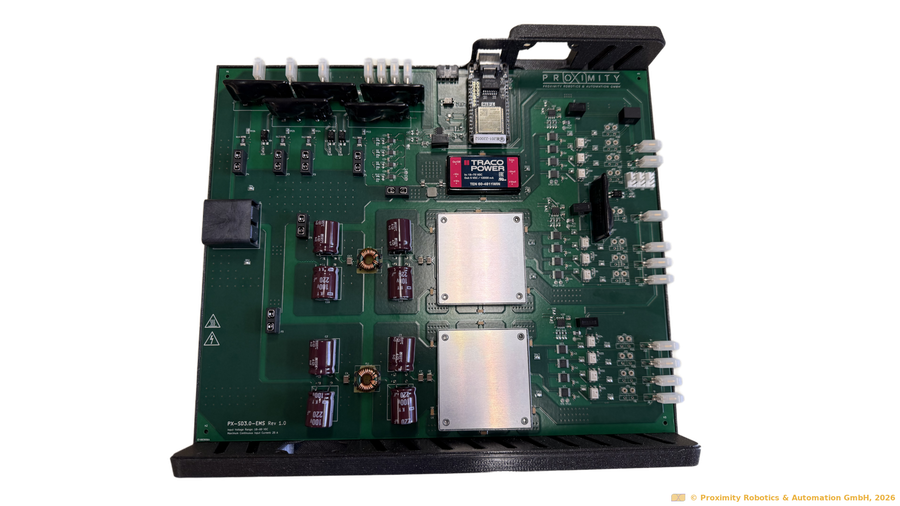
硬件和嵌入式系统开发涵盖了构建可靠的机器人系统所需的定制电子、嵌入式和硬件组件的设计和实现,超越了现成的解决方案。
机器人系统和智能基础设施通常需要专用硬件来实现传感、驱动、电源管理、安全或集成等功能。本服务支持从早期概念和原型设计到量产硬件的整个项目流程,尤其注重与现代机器人软件栈的无缝集成。
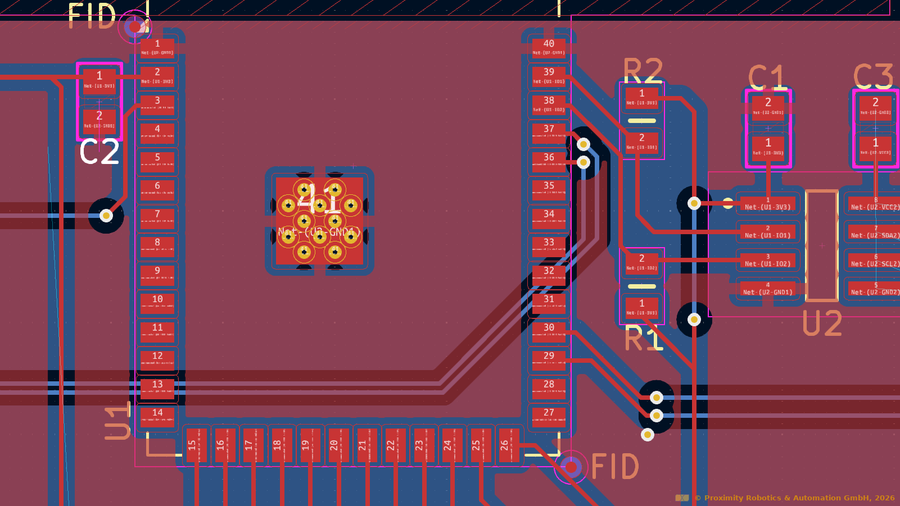

定制电子产品和PCB设计
- 定制PCB设计,用于传感、控制、配电和系统集成
- 选择适用于机器人和工业环境的组件
- 电子设计原型制作与验证
嵌入式固件开发
- 微控制器和片上系统嵌入式固件的开发
- 与上级系统进行实时通信
- 使用micro-ROS和标准接口与ROS 2集成
硬件集成与原型制作
- 将传感器、执行器和控制器集成到机器人系统中
- 快速原型制作和迭代硬件改进
- 支持模块化和可扩展的硬件架构
内部快速原型制作
- 降低早期研发阶段对外部制造的依赖
- 3D打印: FFF/FDM和SLA打印机
- 激光切割、钻孔和机械制造
安全相关硬件集成
- 集成紧急停止按钮、安全 I/O 和认证组件
- 支持安全概念和系统级安全架构
- 与安全和合规要求协调
典型应用案例
- 定制机器人和子系统开发
- 能源监控和电源管理硬件
- 安全相关电子设备和接口
- 研究和工业研发项目
从定制硬件到完整的机器人系统,我们为项目提供从概念到实施的全程支持。欢迎联系我们,探讨您的应用需求。
PoC开发
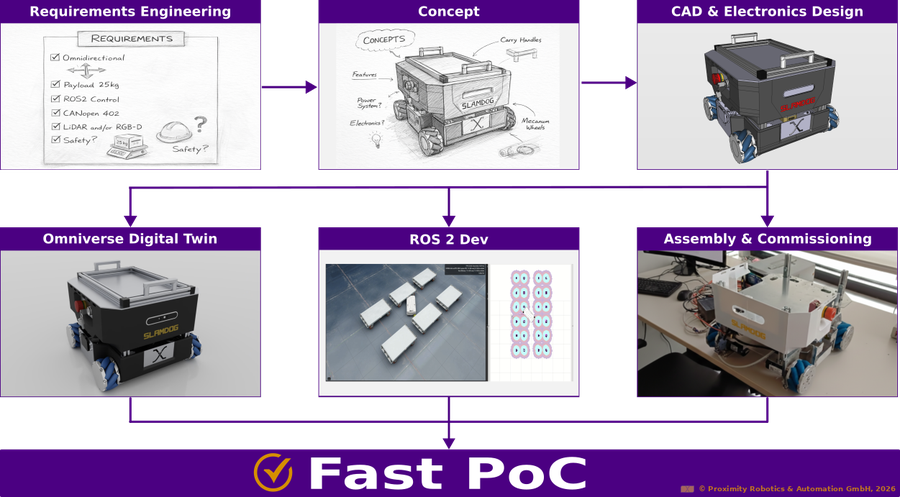
PoC 开发和现场验证侧重于将经过验证的仿真概念和技术理念转化为在真实操作条件下可运行、可演示的机器人系统。
许多项目在前景广阔的概念阶段和实际部署阶段之间停滞不前,原因在于概念验证要么过于实验性,要么风险过高,无法进行现场测试。本服务旨在弥补这一差距,提供可控且安全的概念验证,在不干扰现有运营的前提下,验证项目的可行性、性能和集成潜力。
PoC设计与范围界定
- 明确概念验证目标和成功标准
- 机器人、传感器和系统架构的选择
- 符合运营限制和安全要求
基于仿真的概念验证开发
- 在条件允许的情况下,重复利用数字孪生和仿真资产。
- 现场测试前对控制、感知和系统行为进行验证
- 在流程早期识别风险和局限性
现场部署与测试
- 在真实环境中进行受控安装和设置
- 系统功能的逐步激活
- 在实际运行条件下进行测试
安全意识操作
- PoC操作期间的临时和永久安全措施
- 根据需要集成紧急停止装置和安全认证组件
- 测试阶段的明确操作边界
验证、评估和交接
- 性能、可靠性和局限性的测量
- 结果和建议的记录
- 清晰的下一步部署或扩展指南
典型应用案例
- 对新的自动化或机器人概念进行评估
- 企业研发与创新试点
- 公共资助或合作研发项目
- 首次部署基于学习或先进的机器人系统
智能基础设施
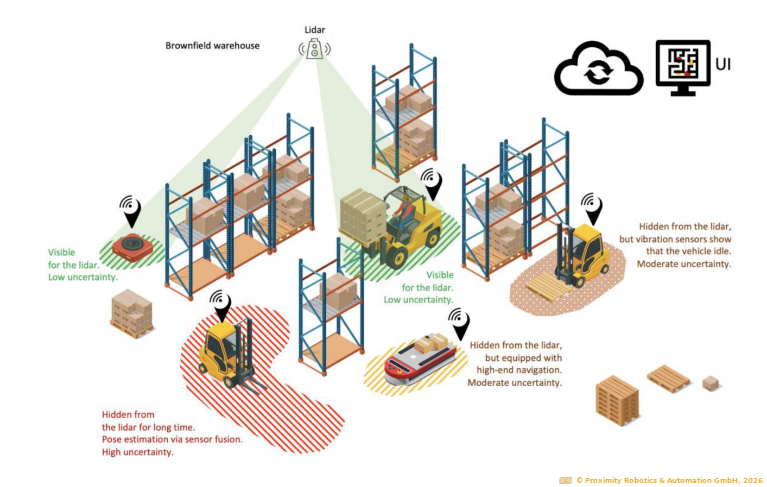
智能基础设施集成旨在实现机器人系统与其周围基础设施之间的无缝交互。该服务并非将机器人视为孤立的机器,而是将它们与建筑物、设施和运营系统连接起来,从而实现协调、安全和高效的运行。
该服务专为机器人必须与门、电梯、门禁系统、安全系统和设施自动化系统进行交互的环境而设计,例如工厂、仓库、医院和公共建筑。
在许多情况下,系统级的感知和智能功能应该集成到基础设施中,而不是每个机器人上。将共享传感器或控制点集成到环境中,比为集群中的每个机器人配备冗余传感器更稳健、更经济高效且更易于维护。我们的方法明确评估了这种权衡,并设计出能够平衡集群复杂性、基础设施能力和长期运行效率的解决方案。


楼宇自动化集成
- 与基于KNX的楼宇自动化系统集成
- 对门、照明、出入口和环境信号的控制和监控
- 机器人与设施自动化逻辑之间的协调
通信与消息传递基础设施
- 使用ROS 2 / DDS进行实时机器人通信的集成
- ZeroMQ用于低延迟、高吞吐量的数据交换
- MQTT用于事件驱动型通信以及与监控或设施系统的集成
工业与设施接口
- 与工业网络(例如CAN、CANopen、EtherCAT 和基于以太网的系统)的接口
- 与安全系统和设施控制器集成
- 机器人、机器和基础设施组件之间可靠的通信
系统协调与行为整合
- 定义机器人与基础设施之间的交互逻辑
- 共享资源(电梯、门、走廊)的处理
- 在网络或组件故障下仍能保持稳健的性能
典型应用案例
- 机器人与照明、电梯和门禁系统交互
- 仓库和工厂中的自主运输
- 医院物流和服务机器人
- 智慧公共和半公共环境
适用人群
- 设施运营商和基础设施所有者
- 工业和物流公司
- 医疗保健和公共机构
- 系统集成商和自动化提供商
智能基础设施使机器人能够参与到机器人集群之外的更大的自动化和监控生态系统中。
网络与云机器人
网络与通信工程专注于设计、保护和优化低延迟、高可靠性的通信基础设施,以服务于在严苛环境下运行的机器人系统。
现代机器人技术依赖于稳定的网络——不仅用于控制和感知,还用于远程访问、可视化、协作和安全操作。
面向机器人技术的网络设计
- 移动机器人和传感器的有线和无线网络设计
- 面向高设备密度和移动性的WiFi 6/WiFi 7规划
- 高性能网络骨干网
- 低延迟流媒体架构(WebRTC)
服务质量与流量工程
- 流量控制、感知和监控的服务质量 (QoS)
- 实时数据流与非关键数据流的分离
- 优先考虑与安全和控制相关的沟通
DDS 和 ROS 2 通信优化
- ROS 2 系统的 DDS 配置和调优
- 组播、发现和传输优化
- 在丢包和干扰条件下实现可靠通信
安全远程访问和连接
- 使用WireGuard和VLESS 的定制 VPN 解决方案
- 用于开发、监控和运维的安全远程访问
- 机器人系统的网络分段和访问控制
验证与压力测试
- 在真实交通模式下进行负载测试(视频、激光雷达、DDS)
- 在恶劣的射频环境下进行验证
- 监测和绩效分析
身份与用户管理
- 使用OIDC/SAML进行用户和访问管理
- 与Keycloak集成,实现集中式身份验证和授权
- 针对机器人、基础设施和工具的基于角色的访问控制