OmniABiD 数据集
OmniABiD是一个开放数据集,旨在评估工业人机协作 (HRC)中的安全性和风险监控方法。它将高保真模拟场景(NVIDIA Omniverse Isaac Sim)与真实世界的记录相结合,从而能够在一致的交互环境中对模拟和现实中的算法进行系统比较。
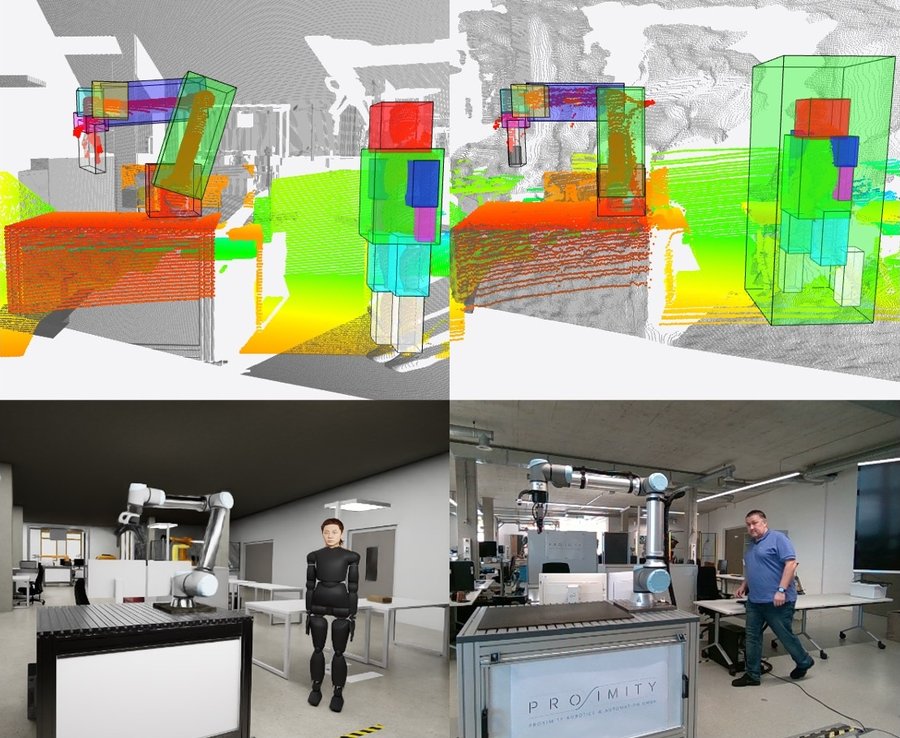
- 在仿真和真实环境中开展工业人机交互场景评估,以验证仿真与真实环境的一致性。
- 重点关注协作/共存任务中的危害分析和风险监控
- 适用于对标风险指标和安全相关感知/监测管道
安全监测方法从仿真到实际迁移的基准测试
评估实际工业交互模式(交接/协作/共存)中的风险监控
用于安全感知和管道监控的训练/验证数据集
请查看我们的出版物:
- F. Plahl、G. Katranis、K. Alba、F. Wolny、S. Vock、A. Morozov 和 I. Mamaev,“OmniABiD:使用 NVIDIA Omniverse 评估人机协作安全性和风险监控中的 Sim2Real 可迁移性”,第 17 届欧洲机器人论坛 (ERF) 会议录,2026 年,即将发表。
了解更多关于我们通过CogniSafe3D项目在机器人安全方面所做的工作。
在 GitHub 上探索 OmniABiD: OmniABiD@github
Partners
LiHRA 数据集
LiHRA是一个开放数据集,用于人机交互(HRI)中的自动化风险监测,其核心是高分辨率3D激光雷达数据。它结合了3D点云、人体关键点和机器人关节状态,以支持实时风险检测和量化方法。该数据集包含4400多个带标签的帧,涵盖了有意接触和无意碰撞事件,从而能够在安全关键条件下进行评估。
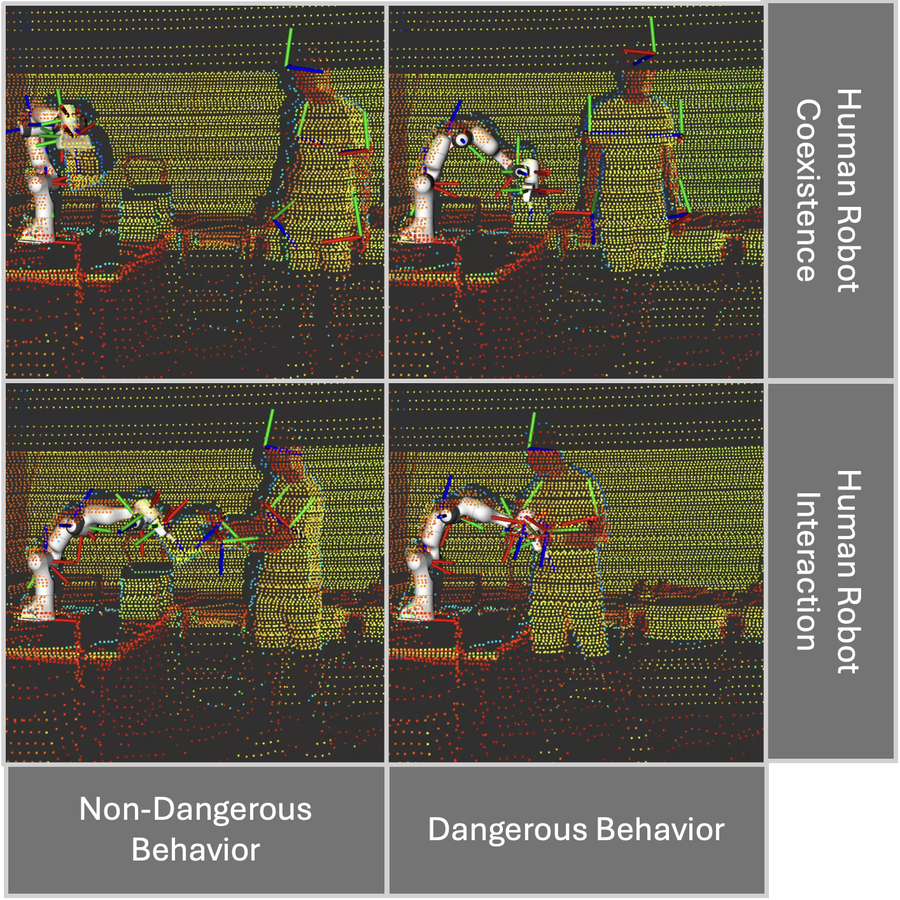
- 以激光雷达为中心的风险监测数据集,包含对齐的人机状态信息
- 包括高分辨率点云、人体关键点和机器人关节状态
- 4400多帧带标签的图像,包含碰撞和接触场景
- 支持开发人工智能驱动的安全监控和主动风险评估方法
请查看我们的出版物:
- F. Plahl、G. Katranis、I. Mamaev 和 A. Morozov,“LiHRA:基于激光雷达的 HRI 数据集,用于自动化风险监控方法”,载于 IEEE/RSJ 国际智能机器人系统会议 (IROS) 会议录,2025 年。
- G. Katranis、F. Plahl、J. Grimstadt、I. Mamaev、S. Vock 和 A. Morozov,“使用基于启发式方法的人机协作动态风险评估”,载于第 35 届欧洲安全可靠性会议 (ESREL) 会议录,2025 年,第 1830-1837 页。
了解更多关于我们通过CogniSafe3D项目在机器人安全方面所做的工作。
在 GitHub 上探索 LiHRA: LiHRA@github