pxIsaacSimURDFImporter
将机器人引入仿真环境很少是一步到位的过程。尤其是在早期原型设计阶段,组件、传感器或运动结构频繁变化,维护一致的仿真模型很快就会变得既耗时又容易出错。
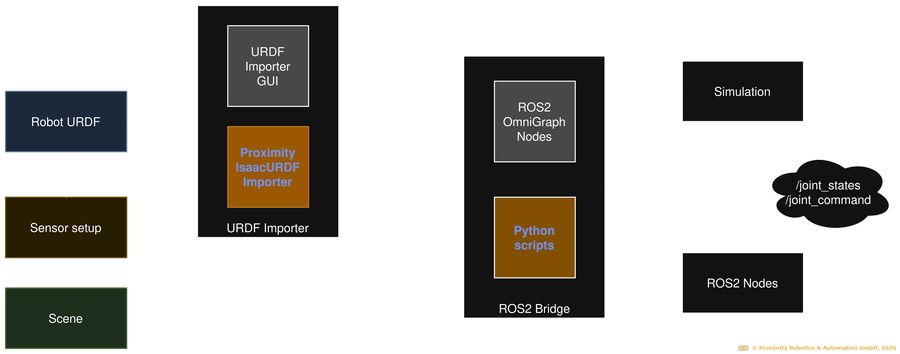
pxIsaacSimURDFImporter通过自动将机器人从其 URDF/xacro 描述导入 NVIDIA Omniverse Isaac Sim,简化了这一流程。工程师无需在每次迭代中手动调整资源,只需一条命令即可初始化完整的仿真场景,从而使设置过程更快、更易于复现。
- 直接从 URDF/xacro 文件将机器人导入 Isaac Sim
- 使用单个命令启动完整的模拟场景
- 集成了 ROS 就绪传感器、关节状态和 ros2_control
- 提供可扩展和可定制的开源架构
无缝URDF集成
将机器人从其 URDF/xacro 描述自动导入 Isaac Sim——以高保真度保留和扩展结构、参数和传感器配置。
ROS 2 原生兼容性
与现有的基于 ROS 的仿真和控制工作流程无缝集成。导入功能开箱即用,支持关节状态、传感器主题和 ROS 2 控制器。
灵活且可复制的原型制作
无需重复手动设置即可快速迭代。根据需要配置导入参数,并在每次构建时生成一致的、可用于仿真的环境。
pxIsaacSimURDFImporter是开源的,并且正在积极维护,持续开发以支持更新的 Isaac Sim 和 ROS 版本。
在GitHub 上探索源代码:PX_IsaacSim_URDF_Importer ,或者使用我们的Slamdog 3.0 迷你机器人和PX_IsaacSim_URDF_Importer_SLAMDOG3进行测试。