Omniverse Atelier
Omniverse Atelier is our simulation and digital twin engineering service for developing, validating, and optimizing robotic systems and processes in high-fidelity virtual environments. It is built around two complementary perspectives: the robot and the process:
- Bring Your Own Robot focuses on turning robots, components, and sensors into high-fidelity, simulation-ready digital twins.
- Bring Your Own Process focuses on replicating real operational workflows and environments in simulation—independent of any specific robot.
Eventually, both perspectives come together in NVIDIA Omniverse to form a single, reusable digital twin that supports decision-making, Proof of Concept, and long-term optimization.


Bring Your Own Robot
We transform your robot or component designs into simulation-ready assets:
- Conversion of CAD models into OpenUSD and URDF/xacro
- High-fidelity assets optimized for physics simulation and photorealistic rendering
- Integration of sensors, joints, and ros2_control interfaces
- Compatibility with NVIDIA Omniverse Isaac Sim / Isaac Lab
This allows robots, end-effectors, sensors, or components to be evaluated, showcased, and tested consistently in simulation and training pipelines.
Bring Your Own Process
We replicate and optimize your real-world processes in high-fidelity simulation:
- Modeling of workcells, production lines, warehouses, and operational environments
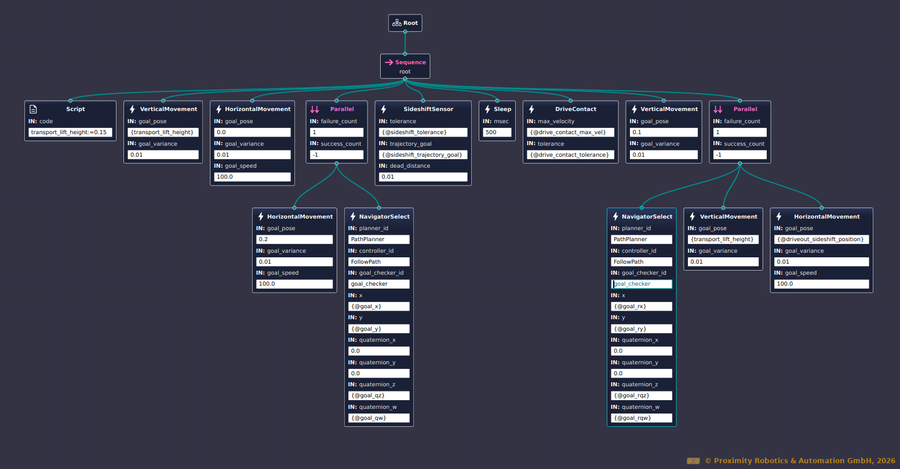
- Process logic, material flow, and task execution modeling (behavior trees)
- Integration with ROS 2, middleware platforms, and sensor configurations
- Testing of automation concepts without physical hardware
- Hardware-in-the-Loop testing
This enables rapid iteration, feasibility studies, and optimization without disrupting real operations.
Typical Use Cases
- Automation feasibility studies
- Evaluation of robots, components, and layouts
- Digital twin–based vendor benchmarking
- Process optimization before deployment
- Teaching and research experiments
What Omniverse Atelier Enables
- Simulation-first decision-making
- Digital twins usable across R&D, PoC, and deployment
- Vendor-neutral evaluation of robots and automation solutions
- Reproducible sim-to-real workflows
- Long-term reuse of digital twins as living assets
Learning-Based Robotics
Learning-Based Robotics is our service for developing, training, and validating robotic systems using data-driven and learning-based methods. In addition to classical imitation learning and reinforcement learning, we support the adaptation and fine-tuning of foundation models, including Vision-Language-Action (VLA) and other open-source models, to specific environments and applications.
Built on simulation-first development, this service covers the full learning lifecycle—from data generation and model adaptation to benchmarking and deployment on real robots—with a strong focus on robustness, reproducibility, and real-world applicability.
Data Generation & Collection
- High-fidelity dataset generation (pxRobotLearning)
Supports large-scale dataset generation both in simulation and on physical robots, ensuring consistency between synthetic and real-world data distributions. - Teleoperation and human-in-the-loop data acquisition (pxTeleopForceXR)
Enables data collection through teleoperation interfaces, wearable devices, and interactive control, allowing humans to guide, correct, and intervene during task execution. - Multi-modal data support
Collects synchronized vision, point cloud, proprioceptive, force, and task-level signals for learning-based robotics. - Structured and versioned datasets
Provides standardized dataset formats with metadata, enabling reproducible training, benchmarking, and long-term evaluation.
Learning & Model Adaptation
- Integrated IL and RL pipelines
Provides end-to-end imitation learning and reinforcement learning workflows, supporting both demonstration-driven and interaction-driven learning. - Fine-tuning of foundation models
Adapts pretrained foundation models to robotics-specific tasks, constraints, and sensor modalities. - Vision–Language–Action model adaptation
Fine-tunes VLA models to customer-specific environments, task semantics, and operational workflows. - Open-model integration
Supports integration and extension of open-source learning and perception models within a unified training framework.
Benchmarking & Validation
- Simulation-based performance benchmarking
Evaluates learning performance under controlled, repeatable simulation scenarios. - Sim-to-real and sim-to-sim validation
Assesses policy robustness across different simulators and during transfer to real hardware. - Stress testing and edge-case evaluation
Validates behavior under disturbances, sensing noise, dynamic obstacles, and rare failure conditions. - Quantitative metrics and logging
Provides systematic evaluation metrics for policy stability, task success rate, and safety constraints.
Deployment & Inference
- Model export and optimization
Supports model conversion, compression, and optimization for deployment on edge and embedded platforms. - ROS 2–based system integration
Seamlessly integrates trained models into ROS 2 pipelines for perception, planning, and control. - On-robot accelerated inference
Enables real-time inference on GPU- or accelerator-equipped robotic hardware with deterministic execution.
Typical Use Cases
- Learning-based manipulation and navigation
Development of policies for grasping, manipulation, locomotion, and autonomous navigation. - Human–robot interaction and assistance
Training interactive behaviors that leverage human input, language instructions, and feedback. - Algorithm benchmarking and evaluation
Comparative evaluation of learning algorithms under standardized conditions. - Research and industrial R&D projects
Applied research, prototype development, and technology validation for industrial robotics applications (e.g., WPT project).
System Integration & Retrofitting
System Integration & Retrofitting focuses on bringing robotic systems into real operational environments—including the transformation of existing vehicles, machines, and infrastructure into automated or autonomous systems.
Many automation projects do not start from a blank sheet. Existing vehicles, workflows, and infrastructure must be reused, adapted, and integrated safely. This service is designed to extend the lifetime and capabilities of current systems while minimizing disruption and investment risk.
Retrofitting Existing Systems
- Conversion of manual or semi-automated vehicles (e.g., AGVs) into autonomous mobile robots
- Reuse and adaptation of existing mechanical platforms and infrastructure
- Integration of additional sensors, compute, and control components
ROS 2–based System Integration
- Integration of heterogeneous hardware into ROS 2 ecosystems
- Middleware configuration and system orchestration
- Modular architectures for maintainability and future extensions
- Industrial and fieldbus protocols including CAN, CANopen, EtherCAT, OPC UA, and Ethernet-based
Commissioning & On-Site Validation
- On-site setup and commissioning
- Controlled testing under real operational conditions
- Iterative refinement during early operation phases
- Operator and stakeholder validation
- Documentation & handover support
Typical Use Cases
- Retrofitting AGVs to AMRs
- Introducing robotics into existing warehouses or factories
- Automation of internal transport and logistics
- Integration of robots into smart buildings and facilities
Control & Optimization
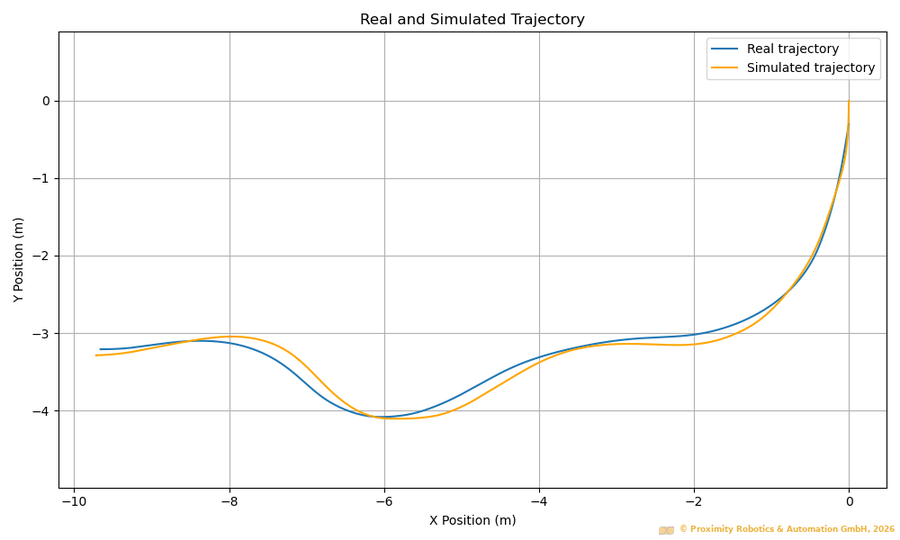
Control & Optimization is our service for designing, tuning, and validating robot motion and control under real-world constraints with the focus is on reliability, safety, and efficiency.
We combine classical control methods with modern optimization and learning-based techniques, using simulation-first validation to ensure that control strategies remain stable and predictable when deployed on real robots.
This service is designed for teams that need robust behavior in production environments, where safety margins, dynamic obstacles, and resource constraints matter.
Control Design & Tuning
- Classical and advanced controllers (PID, MPC, MPPI, task-specific controllers)
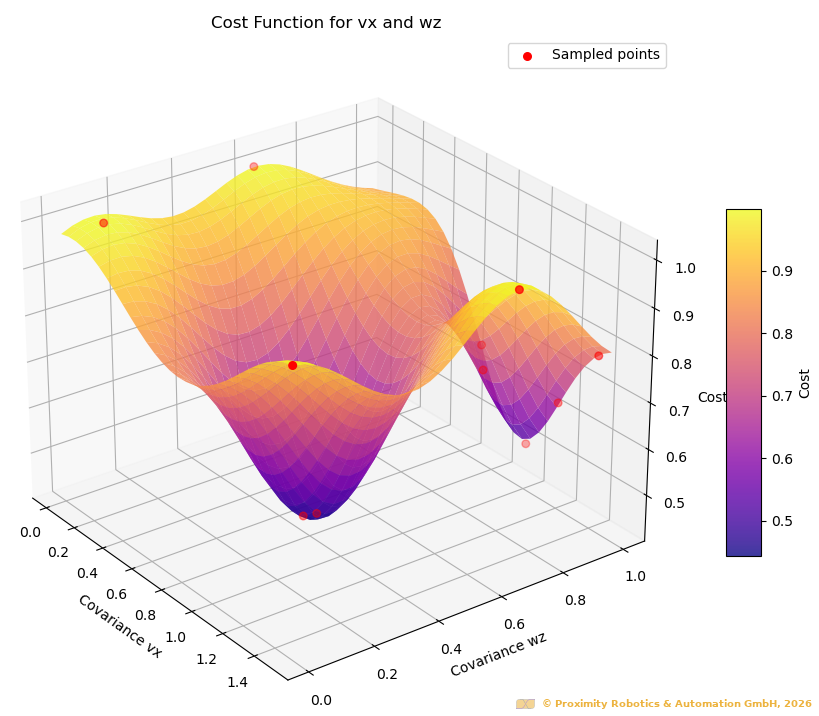
- Controller parameterization and tuning using simulation and optimization methods
- Validation of stability, robustness, and repeatability
Motion Planning & Collision Avoidance
- Global and local motion planning
- Collision avoidance for mobile robots, manipulators, and multi-robot systems
- Human-aware and constraint-aware planning strategies
System-Level Optimization
- Optimization of trajectories, task execution, and motion efficiency
- Throughput and performance optimization in constrained environments
- Energy-aware optimization using real measurement data (pxEMS)
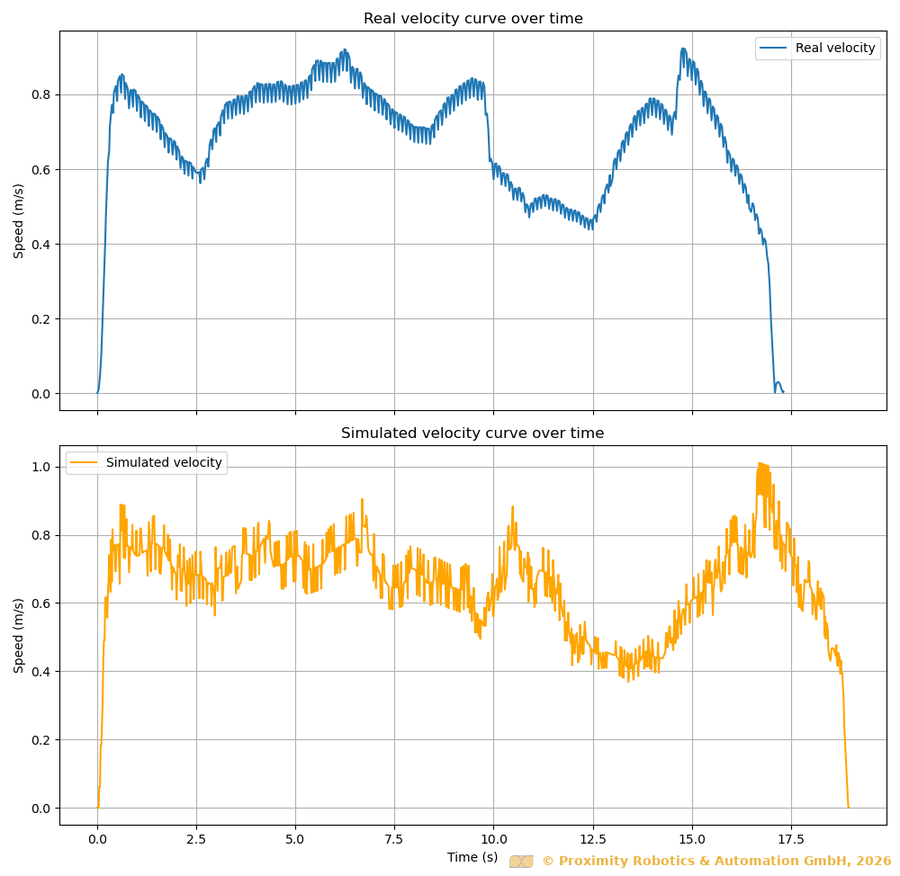
Simulation-Based Validation
- Evaluation of control and planning strategies in Digital Twins
- Stress testing under disturbances, uncertainties, and edge cases
- Comparison of alternative control approaches before deployment
Typical Use Cases
- Mobile robot navigation and manipulation
- Human–robot collaboration scenarios
- Optimization of industrial and logistics processes
- Energy-aware motion and task planning
Why Proximity Robotics?
- Parameterization via Bayesian Optimization – data-driven, efficient, and reproducible
- Easy Integration with ROS 2 & Existing Systems – immediately deployable parameters for your platform
- Published Research – peer-reviewed methods presented at CASE and IROS
For a detailed technical background, see our related publications:
- Y. Tang, X. Huang, Y. Zhang, T. Chen, I. Mamaev, and B. Hein, "ETA-IK: Execution-time-aware inverse kinematics for dual-arm systems," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025.
- Y. Tang, T. Chen, B. Hein, and I. Mamaev, "Improving feasibility and safety of nonlinear MPC with control barrier function via learning-based non-convex reachable sets," in Proc. IEEE 21st Int. Conf. Autom. Sci. Eng. (CASE), 2025.
- M. Ruhe, K. Alba, M. Kipfmueller, and I. Mamaev, "Simulation-to-reality hyperparameter optimization of MPPI controllers via Bayesian optimization in NVIDIA Omniverse Isaac Sim," in Proc. IEEE 21st Int. Conf. Autom. Sci. Eng. (CASE), 2025.
- Y. Tang, I. Mamaev, J. Qin, C. Wurll, and B. Hein, "Reachability-aware collision avoidance for tractor-trailer system with non-linear MPC and control barrier function," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2023.
- Y. Tang, W. Shen, I. Mamaev, and B. Hein, "Towards flexible manufacturing: Motion generation concept for coupled multi-robot systems," in Proc. IEEE 19th Int. Conf. Autom. Sci. Eng. (CASE), 2023.
- X. Ye, W. Shen, I. Mamaev, T. Bertram, M. Bryg, M. Schwartz, S. Hohmann, T. Asfour, B. Hein, M. Kipfmueller, J. Kotschenreuther, "Multi-level optimization approach for multi-robot manufacturing systems," in Proc. 54th Int. Symp. Robot. (ISR Europe), 2022, pp. 1–8.
Software Engineering & ROS 2 Dev
Software Engineering & ROS 2 Development focuses on designing, implementing, and maintaining robust, modular, and production-ready robotics software.
The emphasis is on software that not only works in research or prototypes, but remains maintainable, extensible, and reliable throughout deployment and operation.
We build on ROS 2 as a foundation, combining it with modern middleware, hardware acceleration, and clean software architecture to support long-term robotic systems.
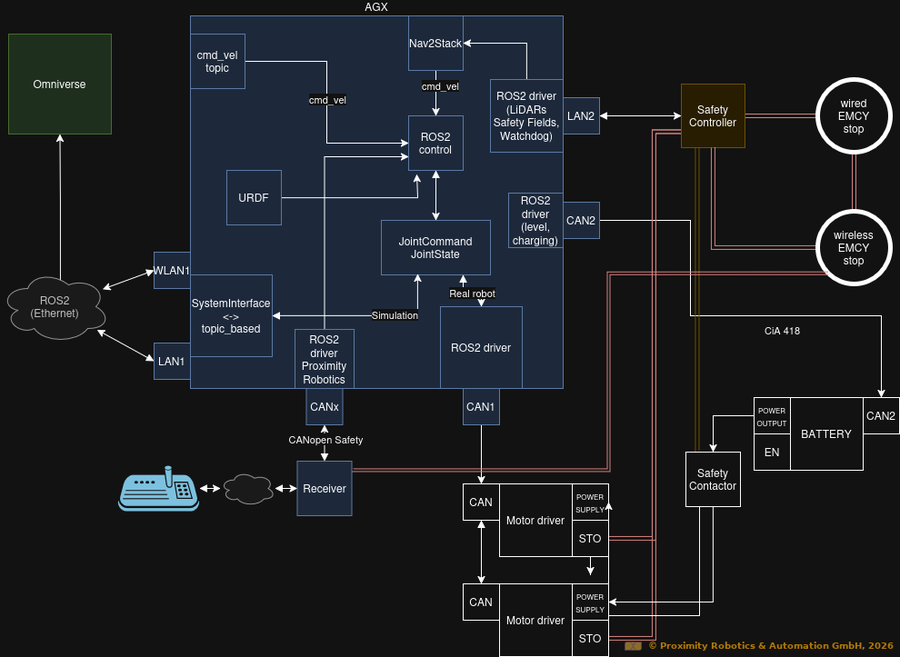
ROS 2 Driver & Middleware Development
- Development of ROS 2 drivers for sensors, actuators, controllers, and safety devices
- Integration of heterogeneous hardware into unified ROS 2 systems
- Middleware configuration using DDS, ZeroMQ, and MQTT where appropriate
Control & System Architecture
- Design of ros2_control architectures
- Reusable project templates for robotic systems, covering common patterns for control, perception, and system orchestration
- Modular node and component structures
- Behavior Trees and state-based orchestration for complex robot behavior
Perception & Data Pipelines
- Perception pipelines for LiDAR, RGB-D cameras, event-based sensors, and tactile sensing
- Real-time data processing and synchronization
- Integration of perception outputs into planning and control loops
Hardware Acceleration & Performance Optimization
- GPU-accelerated pipelines using CUDA
- Optimized inference using ONNX and TensorRT
- Efficient deployment on edge platforms such as NVIDIA Jetson AGX
Software Quality & Maintainability
- Clean APIs and modular interfaces
- Versioned configurations and reproducible builds
- Documentation and handover for long-term operation
- Workshops for dev teams, enabling faster onboarding, consistent architecture decisions, and shared best practices
Typical Use Cases
- Development of ROS 2-based robot platforms
- Integration of new sensors or controllers
- Performance optimization for real-time operation
- Transition from research code to deployable software
Hardware & Embedded
Hardware & Embedded Systems Development covers the design and implementation of custom electronic, embedded, and hardware components required to build reliable robotic systems beyond off-the-shelf solutions.
Robotic systems and smart infrastructure often require specialized hardware for sensing, actuation, power management, safety, or integration. This service supports projects from early concept and prototyping through production-ready hardware, with a strong focus on clean integration into modern robotics software stacks.
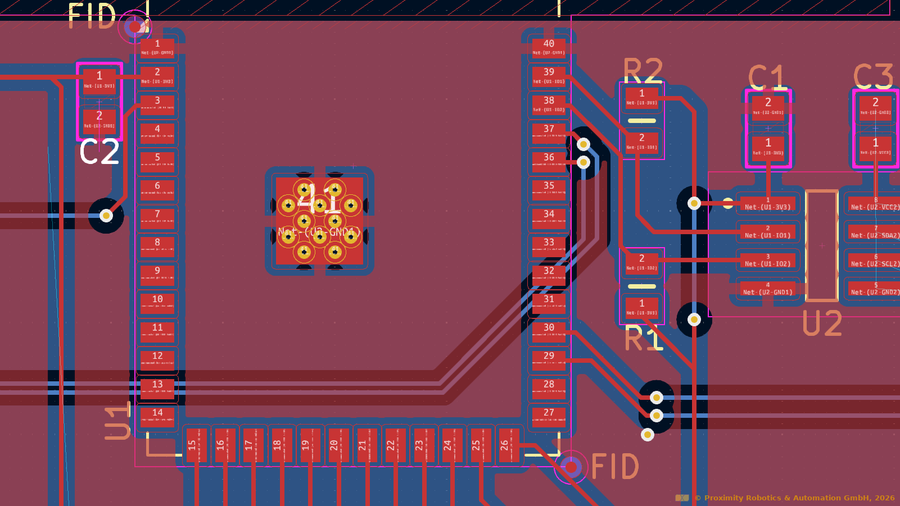
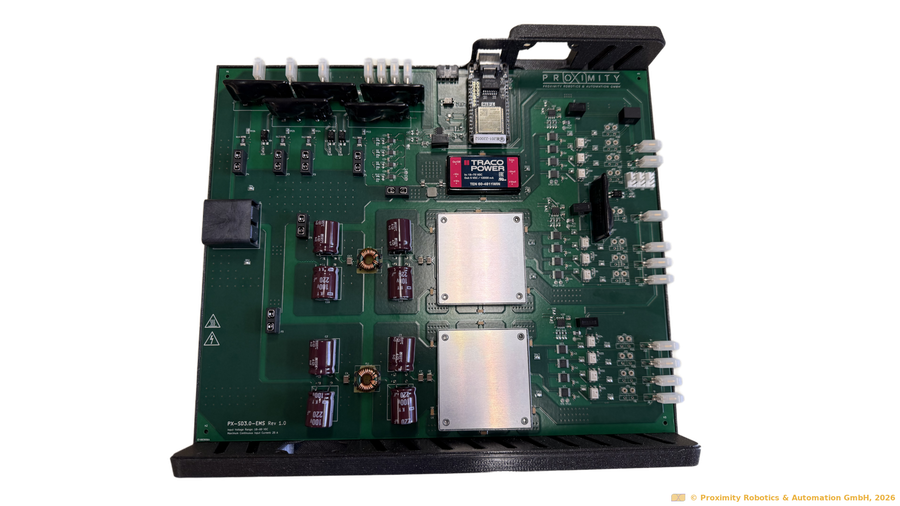

Custom Electronics & PCB Design
- Design of custom PCBs for sensing, control, power distribution, and system integration
- Selection of components suitable for robotic and industrial environments
- Prototyping and validation of electronic designs
Embedded Firmware Development
- Development of embedded firmware for microcontrollers and SoCs
- Real-time communication with higher-level systems
- Integration with ROS 2 using micro-ROS and standard interfaces
Hardware Integration & Prototyping
- Integration of sensors, actuators, and controllers into robotic systems
- Rapid prototyping and iterative hardware refinement
- Support for modular and scalable hardware architectures
In-House Rapid Prototyping
- Reduced dependency on external manufacturing for early-stage development
- 3D Printing: FFF/FDM and SLA printers
- Laser Cutting, Drilling & Mechanical Fabrication
Safety-Related Hardware Integration
- Integration of emergency stops, safety I/O, and certified components
- Support for safety concepts and system-level safety architecture
- Coordination with safety and compliance requirements
Typical Use Cases
- Custom robot and subsystem development
- Energy monitoring and power management hardware
- Safety-related electronics and interfaces
- Research and industrial R&D projects
From custom hardware to complete robotic systems, we support projects from concept to implementation. Contact us to discuss your application.
PoC Development
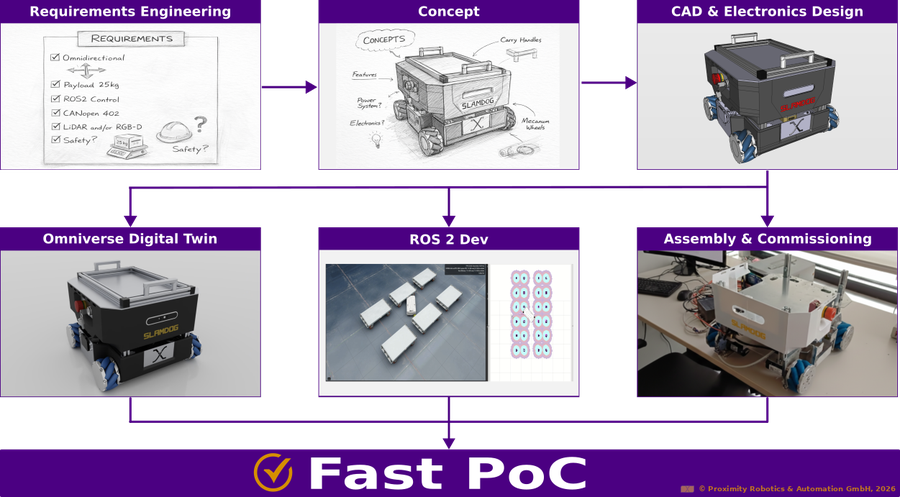
PoC Development & On-Site Validation focuses on transforming validated simulation concepts and technical ideas into working, demonstrable robotic systems under real operational conditions.
Many projects stall between promising concepts and deployment because Proofs of Concept are either too experimental or too risky to test on site. This service is designed to close that gap by delivering controlled, safety-aware PoCs that demonstrate feasibility, performance, and integration potential without disrupting ongoing operations.
PoC Design & Scoping
- Definition of clear PoC objectives and success criteria
- Selection of robots, sensors, and system architecture
- Alignment with operational constraints and safety requirements
Simulation-Backed PoC Development
- Reuse of Digital Twins and simulation assets where available
- Validation of control, perception, and system behavior before on-site testing
- Identification of risks and limitations early in the process
On-Site Deployment & Testing
- Controlled installation and setup in the real environment
- Incremental activation of system functions
- Testing under realistic operating conditions
Safety-Aware Operation
- Temporary and permanent safety measures during PoC operation
- Integration of emergency stops and safety-certified components where required
- Clear operational boundaries for testing phases
Validation, Evaluation & Handover
- Measurement of performance, reliability, and limitations
- Documentation of results and recommendations
- Clear next-step guidance toward deployment or scaling
Typical Use Cases
- Evaluation of new automation or robotics concepts
- Corporate R&D and innovation pilots
- Publicly funded or collaborative R&D projects
- First deployment of learning-based or advanced robotic systems
Smart Infrastructure
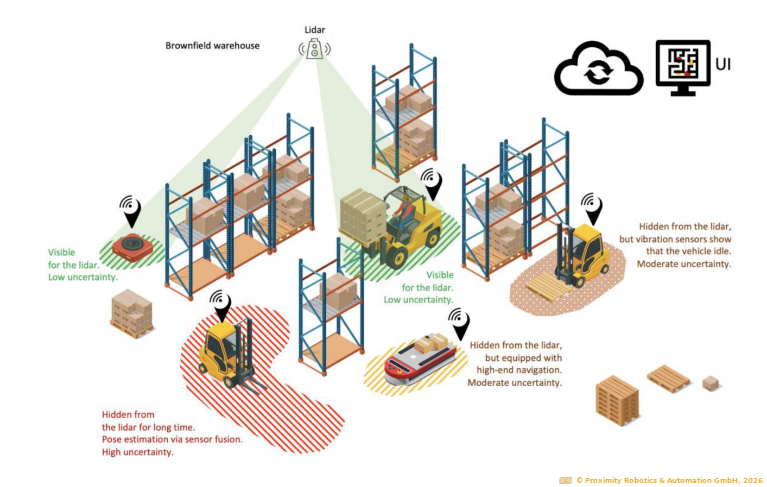
Smart Infrastructure Integration focuses on enabling seamless interaction between robotic systems and their surrounding infrastructure. Rather than treating robots as isolated machines, this service connects them with buildings, facilities, and operational systems to enable coordinated, safe, and efficient operation.
The service is designed for environments where robots must interact with doors, elevators, access control, safety systems, and facility automation, such as factories, warehouses, hospitals, and public buildings.
In many cases, system-level sensing and intelligence belong in the infrastructure rather than on every robot. Integrating a shared sensor or control point into the environment can be more robust, cost-effective, and easier to maintain than equipping each robot in a fleet with redundant sensors. Our approach evaluates this trade-off explicitly and designs solutions that balance fleet complexity, infrastructure capabilities, and long-term operational efficiency.


Building Automation Integration
- Integration with KNX-based building automation systems
- Control and monitoring of doors, lighting, access points, and environmental signals
- Coordination between robots and facility automation logic
Communication & Messaging Infrastructure
- Integration using ROS 2 / DDS for real-time robotic communication
- ZeroMQ for low-latency, high-throughput data exchange
- MQTT for event-driven communication and integration with monitoring or facility systems
Industrial & Facility Interfaces
- Interfaces to industrial networks such as CAN, CANopen, EtherCAT, and Ethernet-based systems
- Integration with safety systems and facility controllers
- Reliable communication between robots, machines, and infrastructure components
System Coordination & Behavior Integration
- Definition of interaction logic between robots and infrastructure
- Handling of shared resources (elevators, doors, corridors)
- Robust behavior under network or component failures
Typical Use Cases
- Robots interacting with lighting, elevators, and access control systems
- Autonomous transport in warehouses and factories
- Hospital logistics and service robotics
- Smart public and semi-public environments
Who It’s For
- Facility operators and infrastructure owners
- Industrial and logistics companies
- Healthcare and public institutions
- System integrators and automation providers
Smart Infrastructure enables robots to participate in larger automation and monitoring ecosystems beyond the robot fleet itself.
Network & Cloud Robotics
Network & Communication Engineering focuses on designing, securing, and optimizing low-latency, high-reliability communication infrastructures for robotic systems operating in demanding environments.
Modern robotics depends on stable networking—not only for control and perception, but also for remote access, visualization, collaboration, and secure operation.
Robotics-Oriented Network Design
- Wired and wireless network design for mobile robots and sensors
- WiFi 6 / WiFi 7 planning for high device density and mobility
- High-performance network backbones
- Low-latency streaming architectures (WebRTC)
QoS & Traffic Engineering
- Quality of Service (QoS) for control, perception, and monitoring traffic
- Separation of real-time and non-critical data flows
- Prioritization of safety- and control-relevant communication
DDS & ROS 2 Communication Optimization
- DDS configuration and tuning for ROS 2 systems
- Multicast, discovery, and transport optimization
- Reliable communication under packet loss and interference
Secure Remote Access & Connectivity
- Custom VPN solutions using WireGuard and VLESS
- Secure remote access for development, monitoring, and operation
- Network segmentation and access control for robotics systems
Validation & Stress Testing
- Load testing under realistic traffic patterns (video, LiDAR, DDS)
- Validation in hostile RF environments
- Monitoring and performance analysis
Identity & User Management
- User and access management using OIDC / SAML
- Integration with Keycloak for centralized authentication and authorization
- Role-based access control for robots, infrastructure, and tools