Energy-Aware Humanoids
Wireless In-Motion Charging for Energy-Aware Humanoid Robots
Humanoid robots are rapidly emerging as a transformative technology across a wide range of application domains, including industrial manufacturing, logistics, healthcare, education, and service robotics. As these systems become more autonomous and capable of complex whole-body motion, their reliance on advanced perception modules, embedded AI computation, and multi-degree-of-freedom actuation continues to grow. This evolution results in significantly increased and highly dynamic energy consumption profiles. Ensuring continuous operation, minimizing downtime, and maintaining energy efficiency therefore represent fundamental challenges for the practical deployment of humanoid robots in real-world environments such as smart factories, warehouses, and hospitals.

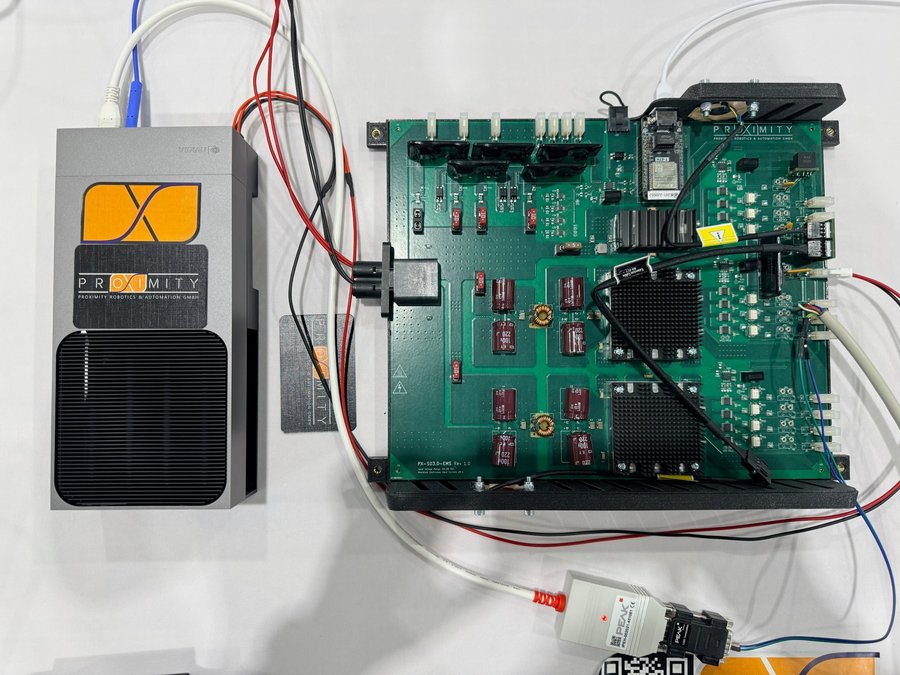
- pxEMS for Energy Profiling of Humanoids
- Sustainable Robotics
- Parameter Optimization using Digital Twins
- Robotic Task Optimization for WPT
- RL-based Locomotion Generation with Energy Constraints
We focus on:
Uninterrupted Operation for Humanoids
- Continuous Energy for Robots: enables sustained humanoid operation without reliance on manual battery swaps or fixed docking stations
- Continuous Energy Management: shifts from discrete charging cycles to ongoing, learning-driven energy optimization to minimize downtime
- Joint Optimization of Mobility & Energy Intake: balances locomotion stability, task performance, and energy harvesting in a unified control framework
Wireless Power Transfer (WPT)
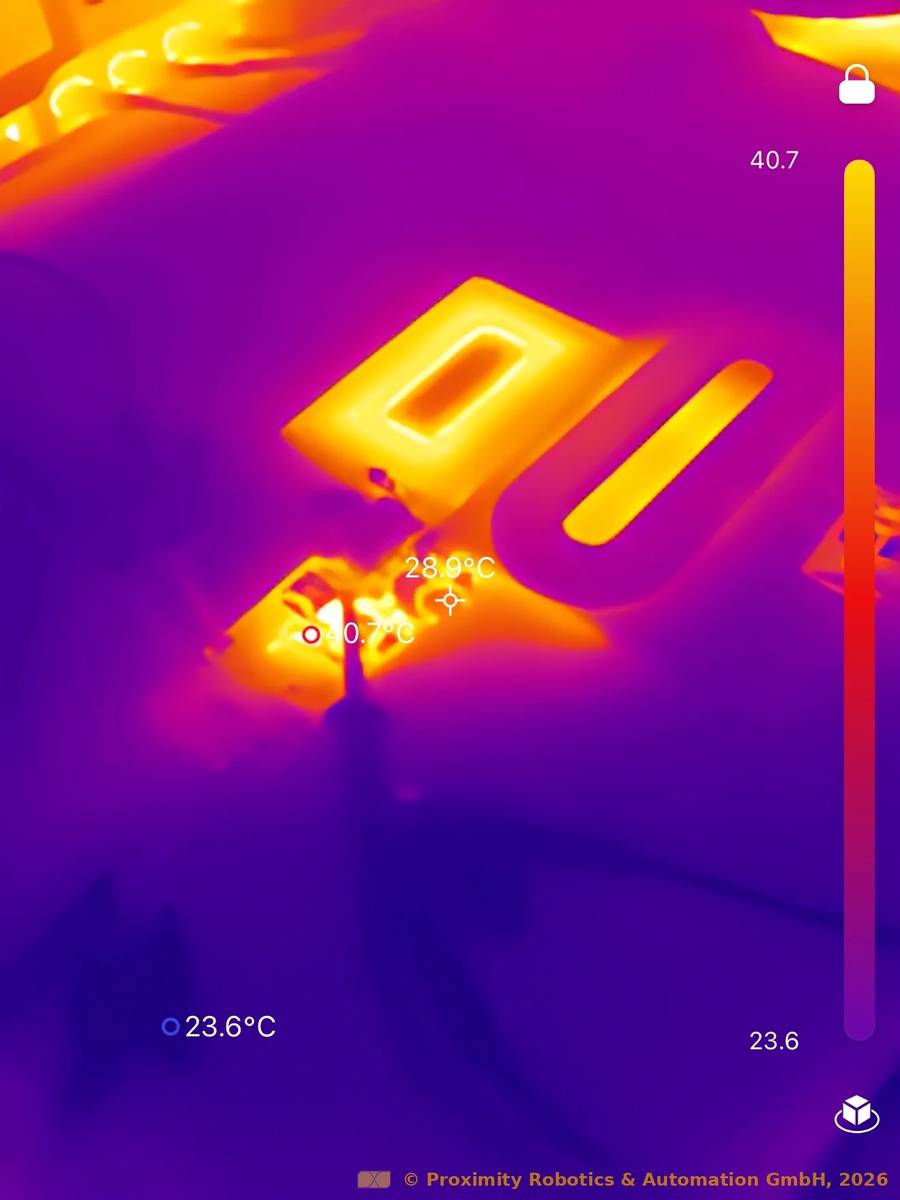
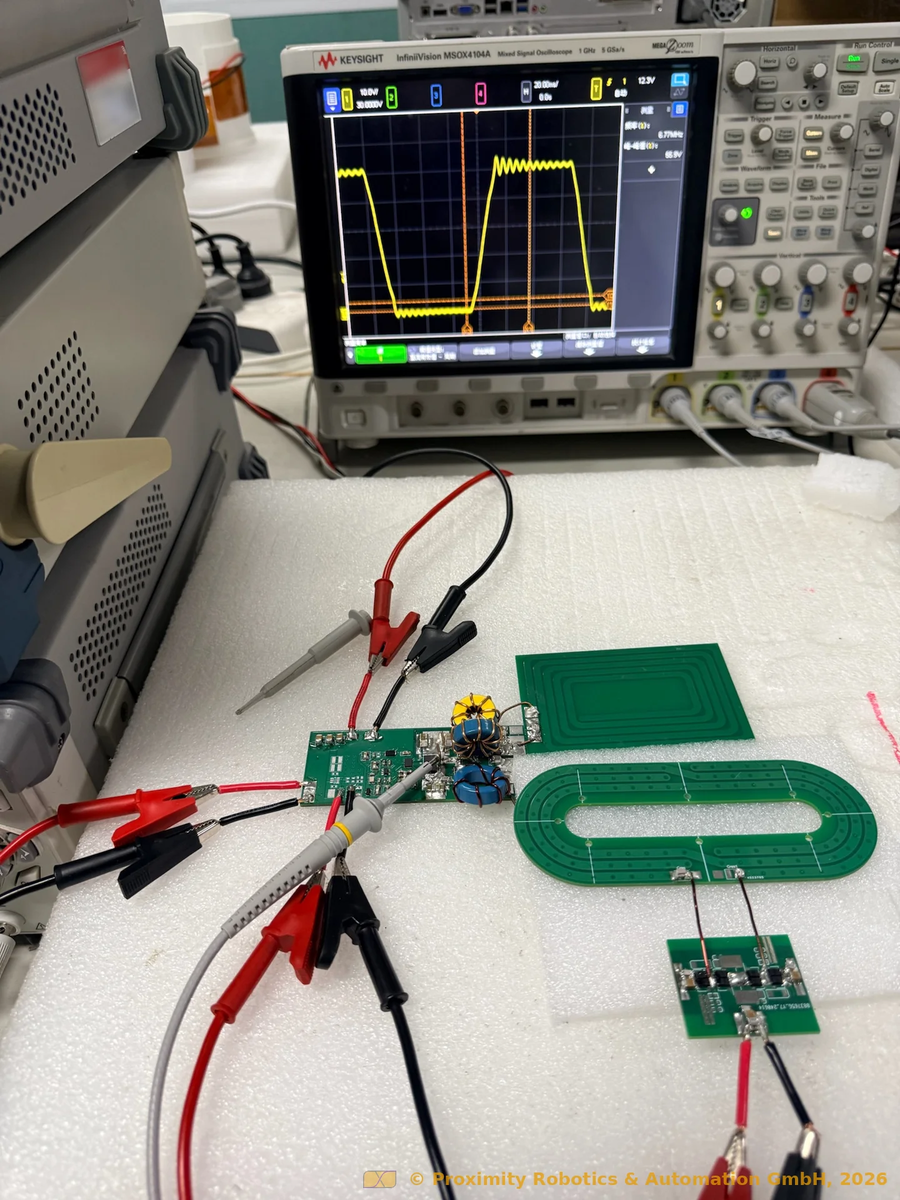
- MHz-Range Wireless Power Transfer (6.78 MHz): high-frequency WPT enables compact, lightweight, and high-power-density charging systems compared to conventional kHz-range approaches.
- Reduced Size & Weight of Charging Hardware: eliminates bulky ferrite materials, resulting in mechanically robust and humanoid-compatible charging modules.
- In-Motion Charging: supports wireless energy transfer while walking, standing, or performing tasks—without precise docking requirements.
Energy-Aware Control Policies
- Reinforcement Learning–Based Locomotion Adaptation: uses reinforcement learning to adapt gait, posture, and foot placement to improve charging efficiency during motion.
- Charging-Module-Aware Locomotion Optimization: integrates the spatial distribution of WPT transmitters directly into the locomotion policy, enabling robots to exploit high-efficiency regions.
- Energy-Aware Charging Strategies: optimizes charging from a control perspective rather than treating it as a separate subsystem.
Infrastructure-Integrated Energy Systems
- Environment-Integrated Charging Infrastructure: embeds WPT transmitters into floors and workspaces, allowing opportunistic energy replenishment during normal operation
- Seamless Energy Integration: aligns infrastructure and robot intelligence to create cooperative energy ecosystems
- Infrastructure-Level Energy Orchestration: coordinates multiple embedded WPT modules to dynamically allocate charging capacity based on robot position, demand, and task priority.
Battery swapping extends runtime — wireless power transfer enables continuous operation.
Upgrade your humanoid platform to uninterrupted, energy-aware operation. Contact us to explore the possibilities.
Also suitable for mobile robotic systems.