pxIsaacSimURDFImporter
Getting a robot into simulation is rarely a single-step process. Especially during early prototyping, when components, sensors, or kinematic structures change frequently, maintaining a consistent simulation model quickly becomes time-consuming and error-prone.
The pxIsaacSimURDFImporter simplifies this process by automating the import of robots into NVIDIA Omniverse Isaac Sim directly from their URDF/xacro descriptions. Instead of manual asset adjustments for every iteration, engineers can initialize a complete simulation scene with a single command—making the setup process both faster and more reproducible.
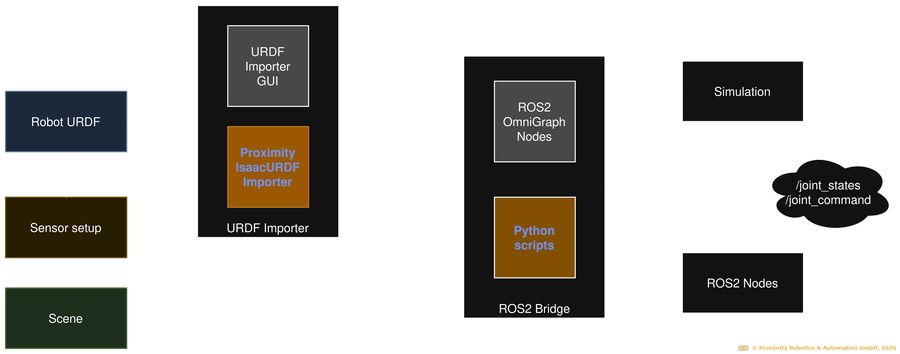
- Imports robots into Isaac Sim directly from URDF/xacro files
- Launches complete simulation scenes with a single command
- Integrates ROS-ready sensors, joint states, and ros2_control
- Provides extensible and customizable open-source architecture
Seamless URDF Integration
Automatically import robots from their URDF/xacro descriptions into Isaac Sim—preserving and extending structure, parameters, and sensor configurations with high fidelity.
ROS 2 Native Compatibility
Integrate smoothly with existing ROS-based simulation and control workflows. The import supports joint states, sensor topics, and ROS 2 controllers out of the box.
Flexible & Reproducible Prototyping
Iterate quickly without repetitive manual setup. Configure import parameters as needed and generate consistent, simulation-ready environments with every build.
The pxIsaacSimURDFImporter is open source and actively maintained, with ongoing development to support newer Isaac Sim and ROS releases.
Explore the source on GitHub: PX_IsaacSim_URDF_Importer, or test it using our Slamdog 3.0 mini robot with PX_IsaacSim_URDF_Importer_SLAMDOG3.