Slamdog 3.0 mini
Slamdog 3.0 mini is a ROS 2-native mobile robot designed as a modular reference platform for research, teaching, and applied robotics development. Built as a modular system, it allows easy adaptation to different applications, sensor configurations, and hardware setups while maintaining reproducible workflows between simulation and real hardware.
Rather than targeting a fixed application, Slamdog 3.0 mini provides a flexible foundation for validating algorithms, system architectures, and robotic concepts under realistic conditions.


Key Features
- Modular architecture
- ROS 2-native open-source software stack
- Omnidirectional drive + differential drive emulator
- Simulation-ready design: fully supported and open-source NVIDIA Isaac Sim model
Technical Specs
- Dimensions (LxWxH): 400x400x334 mm (incl. handles)
- Weight: approx. 20 kg (incl. battery)
- Payload: 20 kg
- Max speed: 1.7 m/s
Hardware Options
- NVIDIA Jetson AGX as onboard controller
Run perception, robotics, and learning-based applications directly on the robot. - 2D / 3D LiDARs
Slamtec, Seyond, RoboSense - RGB-D Cameras
Intel RealSense D455 / D455f
Stereolabs ZED series - Event-Based Cameras
IDS uEye XCP-E (IMX636)
Teaching Use Case
- Open-source, ROS 2-native platform - ready to use!
- Fully integrated Digital Twin
Available in NVIDIA Omniverse Isaac Sim, enabling students to start in simulation and transition seamlessly to real hardware (github). - Available as a self-assembly kit
Supports hands-on learning in system integration, mechanics, electronics, and software.
Energy-aware Robotics
- Integrated energy measurement (optional)
pxEMS provides real-time monitoring of power consumption during experiments and tasks. - Energy-aware education
Enables teaching of energy profiling, comparison of algorithms, and energy-efficient system design. - Research-ready
Supports reproducible energy measurements across different hardware and software configurations.
Still not convinced?
Experience the SLAMDOG 3.0 mini in simulation through the NVIDIA Omniverse Isaac Sim integration: github - PX_IsaacSim_URDF_Importer_SLAMDOG3
pxEMS
pxEMS is a hardware-based Energy Management System designed to make energy consumption a measurable, controllable, and optimizable parameter in robotic and Physical AI systems.
Modern robots integrate powerful compute, rich sensing, and complex actuation—often without clear visibility into where energy is actually consumed. pxEMS closes this gap by making energy consumption measurable and actionable through high-resolution, multi-channel energy monitoring and control. The system continuously tracks energy flows across up to 16 independent channels, providing detailed insight into how individual subsystems consume power during real tasks, enabling energy-aware development from simulation and Proof of Concept to deployment.
Fully integrated into ROS 2 environments, pxEMS allows energy efficiency to be considered alongside performance, safety, and reliability—supporting sustainable, data-driven robotics.

Key Features
- Up to 16 channels for monitoring power consumption of compute, sensors, actuators, and subsystems
- Multiple voltage levels: battery voltage, 24V, 12V and 5V
- Seamless integration into ROS2 environments via micro-ROS
Typical Use Cases
- Energy profiling of mobile robots, manipulators, and humanoids
- Energy-aware controller and policy optimization
- Validation of energy models in Digital Twins
- Sustainability-driven automation projects
- Research and industrial R&D environments
Application Areas
Sustainability is becoming a defining requirement for modern robotic systems. As robots integrate increasingly powerful compute, sensing, and actuation, energy efficiency must be treated as a core design parameter rather than an afterthought.
- we support academic research in energy-aware robotics through a free pxEMS loan program. Contact us for details.
- Robot and automation companies can use pxEMS to validate sustainability claims and increase operational time per battery charge—get in touch to learn more.
pxSafeRemote
pxSafeRemote is a safety-certified remote control designed for robotic systems — when safety requirements exceed what consumer-grade controllers can provide.
Fully integrated into ROS 2, pxSafeRemote enables reliable long-range operation while meeting industrial safety standards for Emergency Stop and Control signals. It provides a secure bridge between experimental systems and safety-compliant operation, ensuring that early-stage automation and robotic systems can be evaluated without compromising personnel or compliance.

- Emergency stop and safe control functions up to Category 3, PL e / SIL 3
- Reliable wireless operation beyond 100 m, suitable for industrial and outdoor environments
- ROS 2 native integration
- Integrated 2.1″ graphic display and vibration feedback for clear system status and alerts
- Suitable for scenarios where safety requirements evolve faster than the system itself
Bridges Poc and Safety Compliance
Enables continued testing and commissioning when safety requirements emerge — without stopping development.
No “Bluetooth Joystick” Compromises
Purpose-built for robotics projects where consumer controllers are no longer acceptable.
Plug-and-Play for Omniverse and ROS 2–based Robots
Integrates directly into existing Omniverse Simulation, ROS 2 control, and safety architectures.
Interested in testing or integrating this remote controller into your project? Contact us for further information.
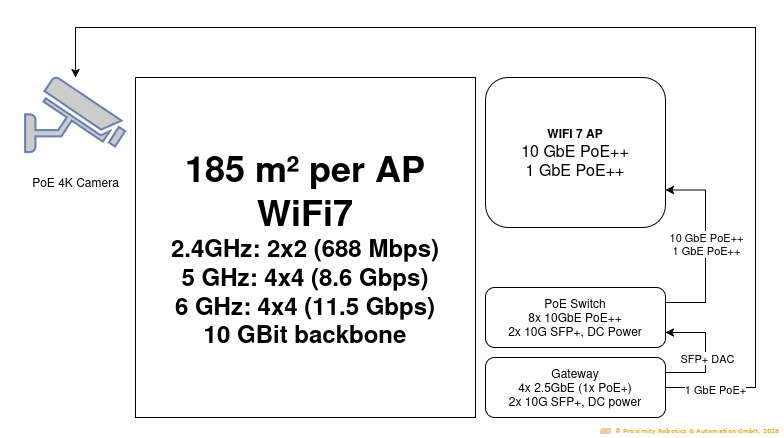
pxMobileNet
High-Performance Network Infrastructure for Robotics Demos & Exhibitions
pxMobileNet is a portable, pre-configured network infrastructure designed for robotics demonstrations, exhibitions, and short-term deployments where radio environments are crowded, unpredictable, and hostile.
Trade fairs and demo environments often suffer from interference, overloaded WiFi, and unstable connectivity—putting robotics demos at risk. pxMobileNet provides a controlled, high-performance communication backbone that ensures reliable operation when it matters most.
Available as a rental service or project-specific deployment.

What pxMobileNet Includes
- WiFi 7 access points with high client capacity and fast roaming
- 10 GbE backbone with PoE++ for cameras, APs, and edge devices
- Support for high-bandwidth sensors (4K PoE cameras, LiDARs)
- Preconfigured QoS profiles for robotics workloads
- Gateway and switching infrastructure optimized for ROS 2 / DDS traffic
Key Advantages
- Robust operation in hostile RF environments
- No dependency on venue WiFi
- Fast setup and teardown
- Known, tested performance characteristics
- Reduced stress for demo teams
- Uninterrupted, Sustainable Power Supply
Optional Add-Ons
- On-site setup and support
- RF & Network monitoring during the event
- Integration with robot and sensor systems
- Private addressing and Secure VPN Remote Access
- 5G Connectivity
- Satellite Internet Access
- AI-Enabled Surveillance & Site Monitoring
- M2.2230 WiFi7 modules for edge devices (Jetson AGX)