OmniABiD Dataset
OmniABiD is an open dataset designed to evaluate safety and risk monitoring methods in industrial Human–Robot Collaboration (HRC). It combines high-fidelity simulated scenarios (NVIDIA Omniverse Isaac Sim) with real-world recordings, enabling systematic comparison of algorithms across simulation and reality in consistent interaction settings.
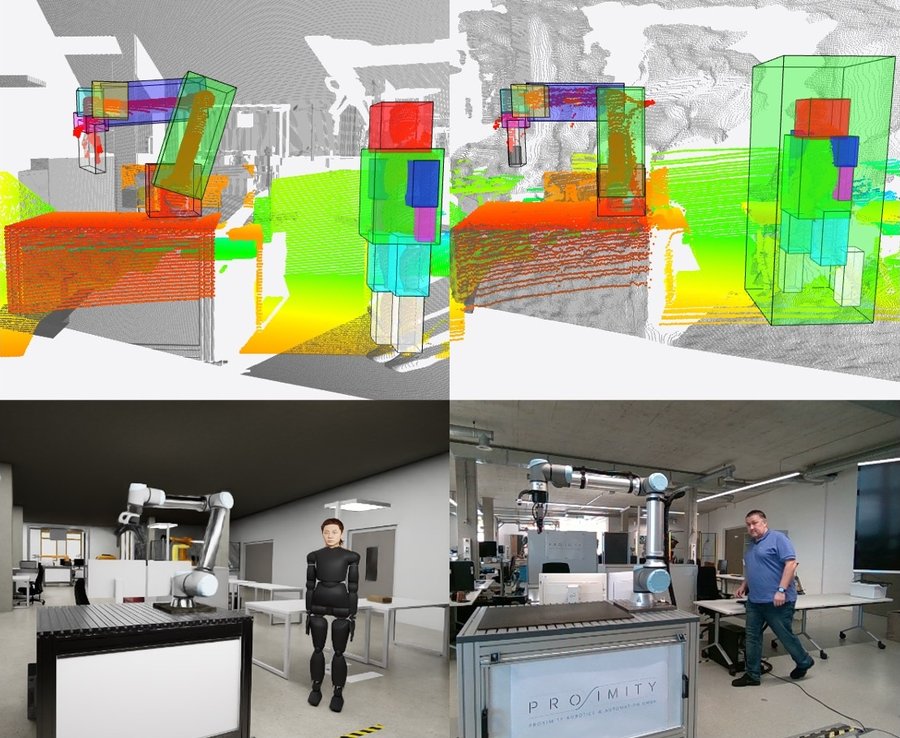
- Industrial HRC scenarios in simulation and real environments for sim-to-real evaluation
- Focus on hazard analysis and risk monitoring in collaboration/coexistence tasks
- Suitable for benchmarking risk metrics and safety-related perception/monitoring pipelines
Benchmarking sim-to-real transfer of safety monitoring methods
Evaluating risk monitoring in realistic industrial interaction patterns (handover/collaboration/coexistence)
Training/validation datasets for safety-aware perception and monitoring pipelines
Check out our publications:
- F. Plahl, G. Katranis, K. Alba, F. Wolny, S. Vock, A. Morozov and I. Mamaev, "OmniABiD: Evaluating Sim2Real Transferability in Safety and Risk Monitoring of Human-Robot Collaboration using NVIDIA Omniverse," in Proc. 17th Eur. Rob. Forum (ERF), 2026, to appear.
Learn more about our work on safety in robotics with the CogniSafe3D project.
Explore OmniABiD on GitHub: OmniABiD@github
LiHRA Dataset
LiHRA is an open dataset for automated risk monitoring in Human–Robot Interaction (HRI), centered on high-resolution 3D LiDAR. It combines 3D point clouds, human keypoints, and robot joint states to support real-time risk detection and quantification methods. The dataset contains 4,400+ labeled frames and includes both intentional contact and unintentional collision events to enable evaluation under safety-critical conditions.
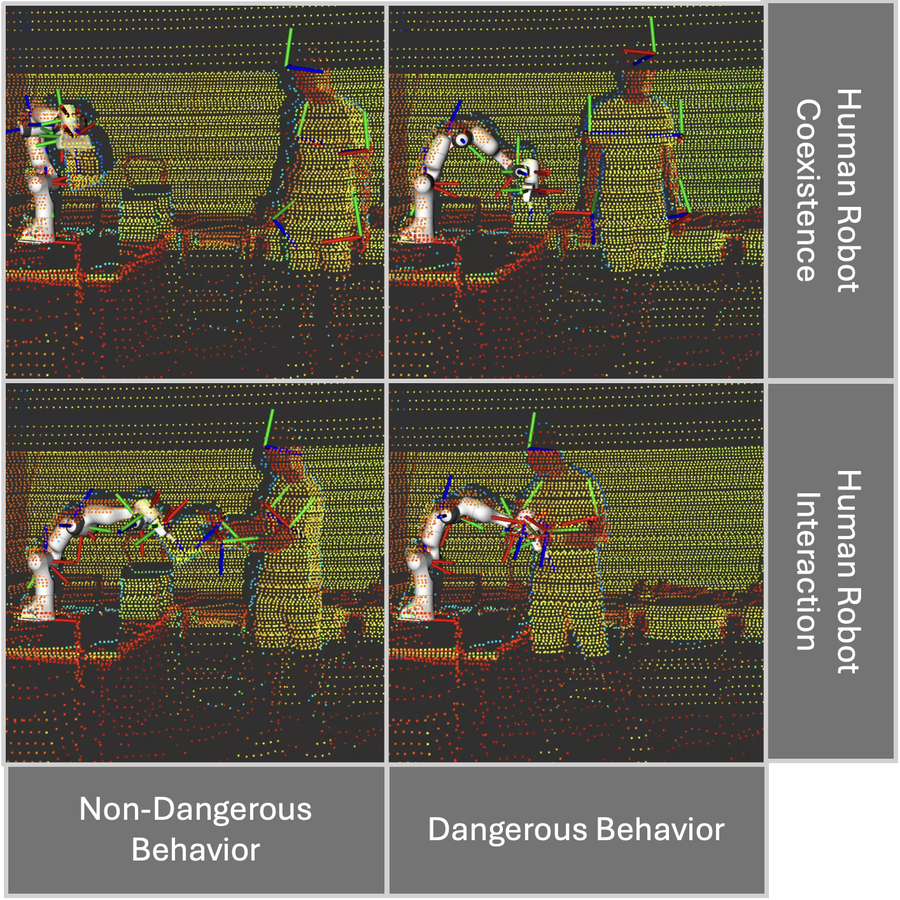
- LiDAR-centric dataset for risk monitoring, with aligned human + robot state information
- Includes high-resolution point clouds, human keypoints, and robot joint states
- 4,400+ labeled frames with both collision and contact scenarios
- Supports development of AI-driven safety monitoring and proactive risk assessment methods
Check out our publications:
- F. Plahl, G. Katranis, I. Mamaev, and A. Morozov, "LiHRA: A LiDAR-based HRI dataset for automated risk monitoring methods," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025.
- G. Katranis, F. Plahl, J. Grimstadt, I. Mamaev, S. Vock, and A. Morozov, "Dynamic risk assessment for human-robot collaboration using a heuristics-based approach," in Proc. 35th Eur. Saf. Reliab. Conf. (ESREL), 2025, pp. 1830–1837.
Learn more about our work on safety in robotics with the CogniSafe3D project.
Explore LiHRA on GitHub: LiHRA@github