Omniverse Atelier
Das Omniverse Atelier ist unser Simulations- und Digital-Twin-Engineering-Service zur Entwicklung, Validierung und Optimierung von Robotersystemen und -prozessen in realitätsnahen virtuellen Umgebungen . Er basiert auf zwei sich ergänzenden Perspektiven: dem Roboter und dem Prozess.
- Bring Your Own Robot konzentriert sich darauf, Roboter, Komponenten und Sensoren in realitätsnahe, simulationsbereite digitale Zwillinge zu verwandeln.
- Bring Your Own Process konzentriert sich auf die Nachbildung realer Arbeitsabläufe und Umgebungen in der Simulation—unabhängig von einem bestimmten Roboter.
Letztendlich fließen beide Perspektiven in NVIDIA Omniverse zusammen und bilden einen einzigen, wiederverwendbaren digitalen Zwilling, der Entscheidungsfindung, Proof of Concept und langfristige Optimierung unterstützt.


Bring Your Own Robot
Wir wandeln Ihre Roboter- oder Komponentendesigns in simulationsbereite Assets um:
- Konvertierung von CAD-Modellen in OpenUSD und URDF/xacro
- Realitätsnahe Assets, optimiert für Physiksimulation und fotorealistisches Rendering.
- Integration von Sensoren, Gelenken und ros2_control-Schnittstellen
- Kompatibilität mit NVIDIA Omniverse Isaac Sim / Isaac Lab
Dies ermöglicht es, Roboter, Endeffektoren, Sensoren oder Komponenten in Simulations- und Trainingsumgebungen einheitlich zu bewerten, darzubieten und zu testen .
Bring Your Own Process
Wir bilden Ihre realen Prozesse in realitätsnahen Simulationen nach und optimieren sie:
- Modellierung von Arbeitszellen, Produktionslinien, Lagern und Betriebsumgebungen
- Prozesslogik, Materialfluss und Modellierung von Aufgabenabläufen (Behavior Trees)
- Integration mit ROS 2, Middleware-Plattformen und Sensorkonfigurationen
- Testen von Automatisierungskonzepten ohne physische Hardware
- Hardware-in-the-Loop-Tests
Dies ermöglicht schnelle Iterationen, Machbarkeitsstudien und Optimierungen, ohne den laufenden Betrieb zu stören .
Typische Anwendungsfälle
- Machbarkeitsstudien zur Automatisierung
- Bewertung von Robotern, Komponenten und Layouts
- Anbietervergleich auf Basis digitaler Zwillinge
- Prozessoptimierung vor der Implementierung
- Lehr- und Forschungsexperimente
Was das Omniverse Atelier ermöglicht
- Simulationsbasierte Entscheidungsfindung
- Digitale Zwillinge, die in Forschung und Entwicklung, Machbarkeitsstudien und Implementierung eingesetzt werden können
- Herstellerneutrale Bewertung von Robotern und Automatisierungslösungen
- Reproduzierbare Sim-to-Real-Workflows
- Digitale Zwillinge als langlebige, dynamische Assets
Lernbasierte Robotik
Lernbasierte Robotik beschreibt unseren Service für die Entwicklung, das Training und die Validierung von Robotersystemen mithilfe datengetriebener und lernbasierter Methoden . Neben klassischem Imitation Learning und Reinforcement Learning unterstützen wir die Anpassung und Feinabstimmung von Foundation Models, darunter Vision-Language-Action (VLA) und andere Open-Source-Modelle, an spezifische Umgebungen und Anwendungen.
Dieser Service basiert auf einer simulationsorientierten Entwicklung und deckt den gesamten Lernzyklus ab – von der Datengenerierung und Modellanpassung bis hin zu Benchmarking und Einsatz auf realen Robotern – mit einem starken Fokus auf Robustheit, Reproduzierbarkeit und Anwendbarkeit in der Praxis.
Datengenerierung & -erfassung
- Generierung realitätsnaher Datensätze ( pxRobotLearning )
Unterstützt die Generierung großer Datensätze sowohl in Simulationen als auch auf physischen Robotern und gewährleistet so die Konsistenz zwischen synthetischen und realen Datenverteilungen. - Teleoperation und Human-in-the-Loop-Datenerfassung ( pxTeleopForceXR )
Ermöglicht die Datenerfassung über Teleoperationsschnittstellen, tragbare Geräte und interaktive Steuerung, wodurch der Mensch während der Aufgabenausführung anleiten, korrigieren und eingreifen kann. - Unterstützung multimodaler Daten
Erfasst synchronisierte visuelle, Punktwolken-, propriozeptive, Kraft- und aufgabenbezogene Signale für lernbasierte Robotik. - Strukturierte und versionierte Datensätze
Bietet standardisierte Datensatzformate mit Metadaten, die reproduzierbares Training, Benchmarking und Langzeitbewertung ermöglichen.
Lernen & Modellanpassung
- Integrierte IL- und RL-Pipelines
Bietet durchgängige Workflows für Imitation Learning und Reinforcement Learning und unterstützt sowohl demonstrationsgesteuertes als auch interaktionsgesteuertes Lernen. - Feinabstimmung der Foundation Models
Passt vorab trainierte Basismodelle an robotikspezifische Aufgaben, Einschränkungen und Sensormodalitäten an. - Anpassung von Vision-Language-Action-Modellen
Feinabstimmung von VLA-Modellen auf kundenspezifische Umgebungen, Aufgabensemantik und operative Arbeitsabläufe. - Integration offener Modelle
Unterstützt die Integration und Erweiterung von Open-Source-Lern- und Perzeptionsmodellen innerhalb eines einheitlichen Trainingsrahmens.
Benchmarking & Validierung
- Simulationsbasiertes Leistungs-Benchmarking
Bewertet die Lernleistung unter kontrollierten, wiederholbaren Simulationsszenarien. - Sim-to-Real- und Sim-to-Sim-Validierung
Bewertet die Robustheit der Richtlinien in verschiedenen Simulatoren und beim Transfer auf reale Hardware. - Stresstests und Grenzfallanalyse
Validiert das Verhalten unter Störungen, Sensorauschen, dynamischen Hindernissen und seltenen Ausfallbedingungen. - Quantitative Kennzahlen und Protokollierung
Bietet systematische Bewertungsmetriken für die Stabilität der Politik, die Erfolgsquote der Aufgaben und die Sicherheitsbeschränkungen.
Deployment & Inferenz
- Modellexport und -optimierung
Unterstützt Modellkonvertierung, -komprimierung und -optimierung für den Einsatz auf Edge- und Embedded-Plattformen. - ROS 2-basierte Systemintegration
Integriert trainierte Modelle nahtlos in ROS 2-Pipelines für Wahrnehmung, Planung und Steuerung. - Beschleunigte Inferenz auf dem Roboter
Ermöglicht Echtzeit-Inferenz auf mit GPUs oder Beschleunigern ausgestatteter Roboterhardware mit deterministischer Ausführung.
Typische Anwendungsfälle
- Lernbasierte Manipulation und Navigation
Entwicklung von Strategien für Greifen, Manipulation, Fortbewegung und autonome Navigation. - Mensch-Roboter-Interaktion und -Unterstützung
Training interaktiver Verhaltensweisen, die menschliche Eingaben, sprachliche Anweisungen und Feedback nutzen. - Algorithmen-Benchmarking und -Bewertung
Vergleichende Bewertung von Lernalgorithmen unter standardisierten Bedingungen. - Forschungs- und industrielle F&E-Projekte
Angewandte Forschung, Prototypenentwicklung und Technologievalidierung für industrielle Robotikanwendungen (z. B. WPT-Projekt ).
Systemintegration &amo Retrofitting
Systemintegration & Retrofitting konzentriert sich auf die Integration von Robotersystemen in reale Betriebsumgebungen – einschließlich der Umwandlung bestehender Fahrzeuge, Maschinen und Infrastrukturen in automatisierte oder autonome Systeme.
Viele Automatisierungsprojekte beginnen nicht bei Null. Bestehende Fahrzeuge, Arbeitsabläufe und Infrastrukturen müssen wiederverwendet, angepasst und sicher integriert werden. Dieser Service ist darauf ausgelegt, die Lebensdauer und Leistungsfähigkeit bestehender Systeme zu verlängern und gleichzeitig Störungen und Investitionsrisiken zu minimieren.
Retrofitting bestehender Systeme
- Umrüstung von manuell oder halbautomatisiert gesteuerten Fahrzeugen (z. B. AGVs) in autonome mobile Roboter
- Wiederverwendung und Anpassung bestehender mechanischer Plattformen und Infrastrukturen
- Integration zusätzlicher Sensoren, Rechen- und Steuerungskomponenten
ROS 2-basierte Systemintegration
- Integration heterogener Hardware in ROS 2-Umgebungen
- Middleware-Konfiguration und Systemorchestrierung
- Modulare Architekturen für Wartungsfreundlichkeit und zukünftige Erweiterungen
- Industrielle und Feldbusprotokolle einschließlich CAN, CANopen, EtherCAT, OPC UA und Ethernet-basierte
Inbetriebnahme & On-Site Validierung
- Einrichtung und Inbetriebnahme vor Ort
- Kontrollierte Tests unter realen Betriebsbedingungen
- Iterative Verfeinerung in frühen Betriebsphasen
- Validierung durch Betreiber und Stakeholder
- Dokumentations- und Übergabeunterstützung
Typische Anwendungsfälle
- Retrofitting von AGVs zu AMRs
- Einführung von Robotik in bestehende Lagerhallen oder Fabriken
- Automatisierung des internen Transports und der Logistik
- Integration von Robotern in intelligente Gebäude und Anlagen
Steuerung und Optimierung
Steuerung & Optimierung ist unser Service für die Entwicklung, Abstimmung und Validierung robotischer Bewegungssteuerungen unter realen Randbedingungen, wobei der Fokus auf Zuverlässigkeit, Sicherheit und Effizienz liegt.
Wir kombinieren klassische Regelungsmethoden mit modernen Optimierungs- und lernbasierten Techniken und verwenden eine simulationsbasierte Validierung , um sicherzustellen, dass die Regelungsstrategien auch bei der Anwendung auf realen Robotern stabil und vorhersagbar bleiben.
Dieser Service ist für Teams konzipiert, die in Produktionsumgebungen ein robustes Verhalten benötigen, wo Sicherheitsabstände, dynamische Hindernisse und Ressourcenbeschränkungen eine Rolle spielen.
Reglerentwurf & -optimierung
- Klassische und fortgeschrittene Regler (PID, MPC, MPPI, aufgabenspezifische Regler)
- Reglerparametrisierung und -optimierung mittels Simulations- und Optimierungsmethoden
- Validierung von Stabilität, Robustheit und Wiederholbarkeit
Bewegungsplanung und Kollisionsvermeidung
- Globale und lokale Bewegungsplanung
- Kollisionsvermeidung für mobile Roboter, Manipulatoren und Multi-Robotersysteme
- Planungsstrategien unter Berücksichtigung von Restriktionen und Personen im Roboterumfeld
Systemoptimierung
- Optimierung von Bewegungsabläufen, Aufgabenausführung und Bewegungseffizienz
- Durchsatz- und Leistungsoptimierung in eingeschränkten Umgebungen
- Energiebewusste Optimierung unter Verwendung realer Messdaten ( pxEMS )
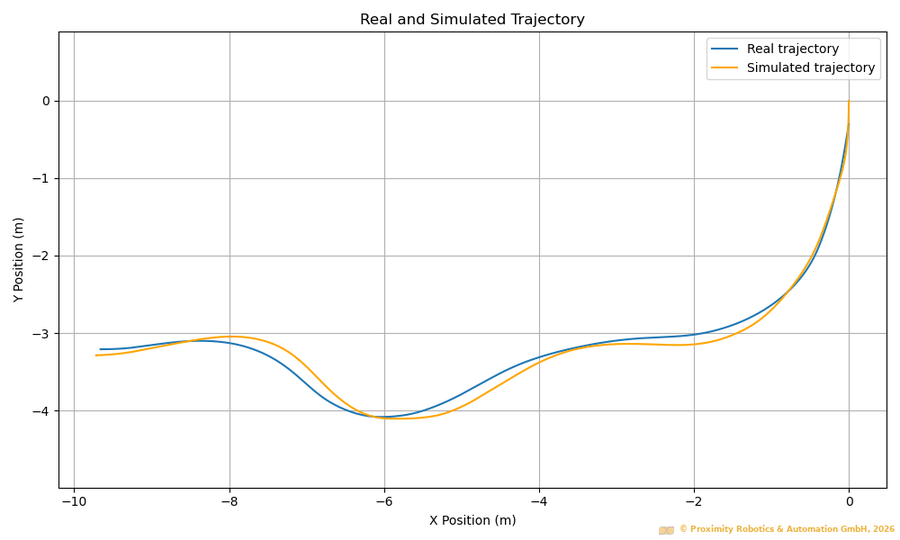
Simulationsbasierte Validierung
- Bewertung von Steuerungs- und Planungsstrategien in digitalen Zwillingen
- Stresstests unter Störungen, Unsicherheiten und Grenzfällen
- Vergleich alternativer Steuerungsansätze vor dem Einsatz
Typische Anwendungsfälle
- Navigation mobiler Roboter und Objektmanipulation
- Szenarien der Mensch-Roboter-Kollaboration
- Optimierung von Industrie- und Logistikprozessen
- Energiebewusste Bewegungs- und Aufgabenplanung
Warum Proximity Robotics?
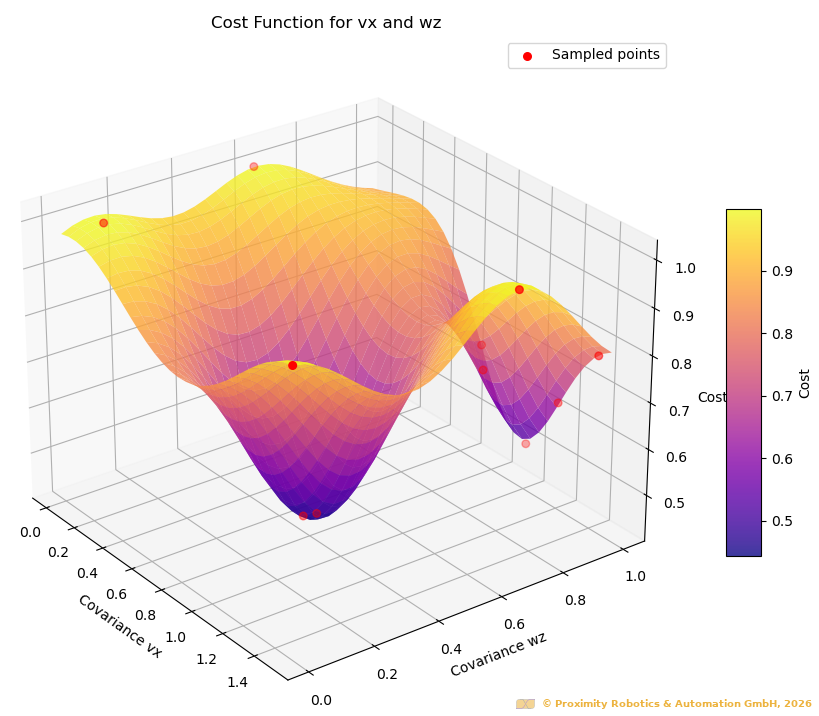
- Parametrisierung mittels Bayes'scher Optimierung – datengetrieben, effizient und reproduzierbar
- Einfache Integration mit ROS 2 und bestehenden Systemen – sofort einsetzbare Parameter für Ihre Plattform
- Veröffentlichte Forschung – peer-reviewed Methoden auf CASE und IROS
Für detaillierte technische Hintergrundinformationen verweisen wir auf unsere zugehörigen Veröffentlichungen:
- Y. Tang, X. Huang, Y. Zhang, T. Chen, I. Mamaev, and B. Hein, "ETA-IK: Execution-time-aware inverse kinematics for dual-arm systems," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025.
- Y. Tang, T. Chen, B. Hein, and I. Mamaev, "Improving feasibility and safety of nonlinear MPC with control barrier function via learning-based non-convex reachable sets," in Proc. IEEE 21st Int. Conf. Autom. Sci. Eng. (CASE), 2025.
- M. Ruhe, K. Alba, M. Kipfmueller, and I. Mamaev, "Simulation-to-reality hyperparameter optimization of MPPI controllers via Bayesian optimization in NVIDIA Omniverse Isaac Sim," in Proc. IEEE 21st Int. Conf. Autom. Sci. Eng. (CASE), 2025.
- Y. Tang, I. Mamaev, J. Qin, C. Wurll, and B. Hein, "Reachability-aware collision avoidance for tractor-trailer system with non-linear MPC and control barrier function," in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2023.
- Y. Tang, W. Shen, I. Mamaev, and B. Hein, "Towards flexible manufacturing: Motion generation concept for coupled multi-robot systems," in Proc. IEEE 19th Int. Conf. Autom. Sci. Eng. (CASE), 2023.
- X. Ye, W. Shen, I. Mamaev, T. Bertram, M. Bryg, M. Schwartz, S. Hohmann, T. Asfour, B. Hein, M. Kipfmueller, J. Kotschenreuther, "Multi-level optimization approach for multi-robot manufacturing systems," in Proc. 54th Int. Symp. Robot. (ISR Europe), 2022, pp. 1–8.
Software Engineering & ROS 2 Dev
Dieser Service konzentriert sich auf die Entwicklung, Implementierung und Wartung robuster, modularer und produktionsreifer Robotiksoftware .
Der Schwerpunkt liegt auf Software, die nicht nur in der Forschung oder in Prototypen funktioniert, sondern auch während des gesamten Einsatzes und Betriebs wartungsfreundlich, erweiterbar und zuverlässig bleibt.
Wir nutzen ROS 2 als Grundlage und kombinieren es mit moderner Middleware, Hardware-Beschleunigung und sauberer Softwarearchitektur, um langfristige Robotersysteme zu unterstützen.
ROS 2 Treiber- & Middleware-Entwicklung
- Entwicklung von ROS 2-Treibern für Sensoren, Aktoren, Steuerungen und Sicherheitsvorrichtungen
- Integration heterogener Hardware in einheitliche ROS 2-Systeme
- Middleware-Konfiguration unter Verwendung von DDS , ZeroMQ und MQTT , wo angebracht
Steuerungs- & Systemarchitektur
- Entwurf von ros2_control-Architekturen
- Wiederverwendbare Projektvorlagen für Robotersysteme, die gängige Muster für Steuerung, Wahrnehmung und Systemorchestrierung abdecken
- Modulare Knoten- und Komponentenstrukturen
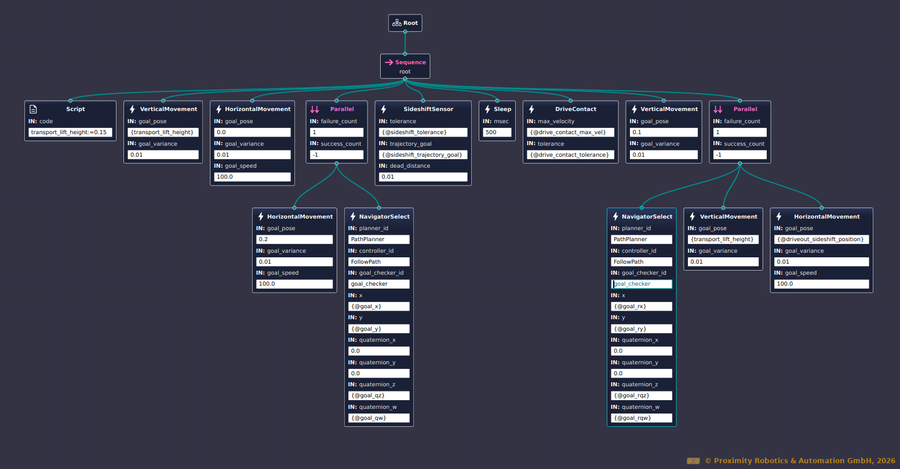
- Verhaltensbäume und zustandsbasierte Orchestrierung für komplexes Roboterverhalten
Wahrnehmungs- & Datenpipelines
- Wahrnehmungspipelines für LiDAR, RGB-D-Kameras, ereignisbasierte Sensoren und taktile Sensoren
- Echtzeit-Datenverarbeitung und -Synchronisierung
- Integration von Perzeptionsdaten in Planungs- und Regelkreise
Hardwarebeschleunigung und Leistungsoptimierung
- GPU-beschleunigte Pipelines mit CUDA
- Optimierte Inferenz mit ONNX und TensorRT
- Effizientes Deployment auf Edge-Plattformen wie NVIDIA Jetson AGX
Softwarequalität & Wartbarkeit
- Saubere APIs und modulare Schnittstellen
- Versionierte Konfigurationen und reproduzierbare Builds
- Dokumentation und Übergabe für den Langzeitbetrieb
- Workshops für Entwicklerteams , die ein schnelleres Onboarding, einheitliche Architekturentscheidungen und den Austausch bewährter Verfahren ermöglichen.
Typische Anwendungsfälle
- Entwicklung von ROS 2-basierten Roboterplattformen
- Integration neuer Sensoren oder Controller
- Leistungsoptimierung für Echtzeitbetrieb
- Übergang von Forschungscode zu einsetzbarer Software
Hardware & Embedded
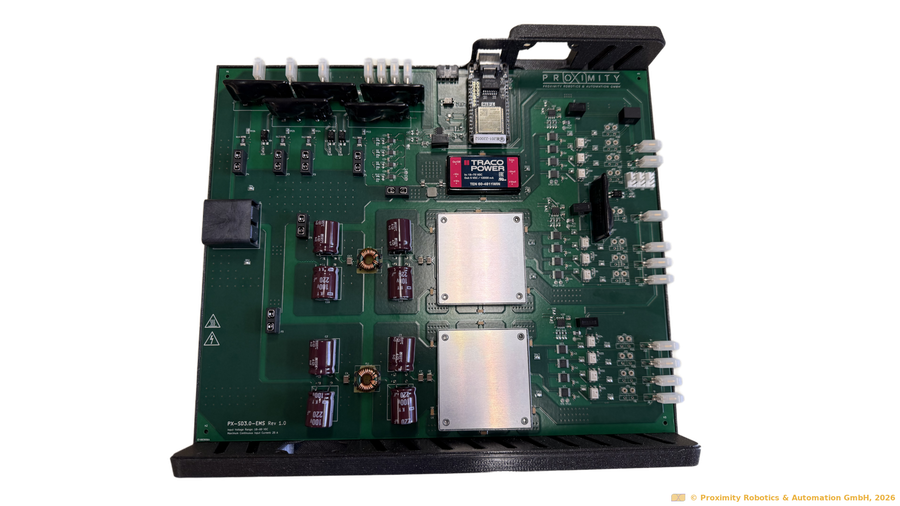
Die Hardware- und Embedded-Systementwicklung umfasst die Konzeption und Implementierung kundenspezifischer elektronischer, eingebetteter und Hardwarekomponenten, die für den Aufbau zuverlässiger Robotersysteme jenseits von Standardlösungen erforderlich sind.
Robotersysteme und intelligente Infrastrukturen benötigen häufig spezialisierte Hardware für Sensorik, Aktorik, Energiemanagement, Sicherheit oder Integration. Dieser Service unterstützt Projekte von der ersten Konzeptphase und dem Prototyping bis hin zur serienreifen Hardware , mit einem starken Fokus auf die nahtlose Integration in moderne Robotik-Software-Stacks.
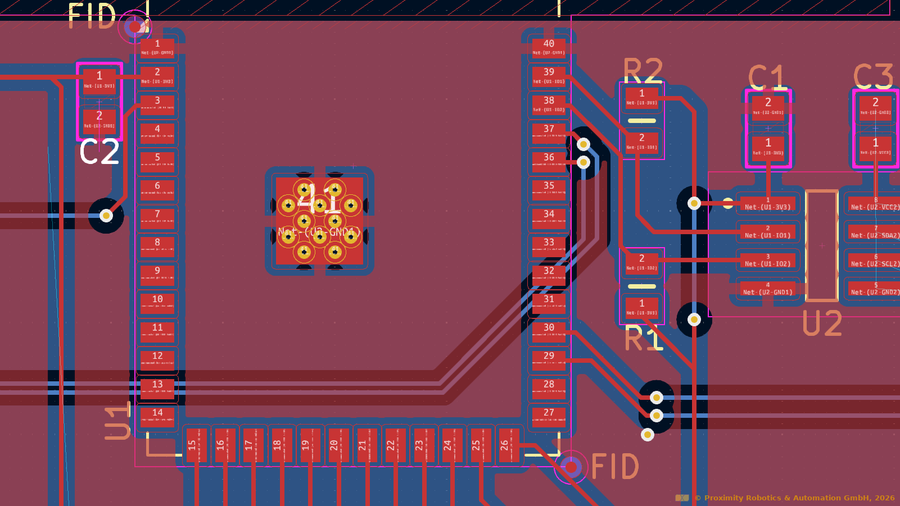

Kundenspezifische Elektronik & Leiterplattenentwicklung
- Entwicklung kundenspezifischer Leiterplatten für Sensorik, Steuerung, Stromverteilung und Systemintegration
- Auswahl von Komponenten, die für Roboter- und Industrieumgebungen geeignet sind
- Prototyping und Validierung elektronischer Designs
Entwicklung eingebetteter Firmware
- Entwicklung eingebetteter Firmware für Mikrocontroller und SoCs
- Echtzeitkommunikation mit übergeordneten Systemen
- Integration mit ROS 2 über micro-ROS und Standardschnittstellen
Hardwareintegration & Prototyping
- Integration von Sensoren, Aktoren und Steuerungen in Robotersysteme
- Schnelles Prototyping und iterative Hardware-Verfeinerung
- Unterstützung für modulare und skalierbare Hardwarearchitekturen
Interne schnelle Prototypentwicklung
- Verringerte Abhängigkeit von externer Fertigung für die frühe Entwicklungsphase
- 3D-Druck : FFF/FDM- und SLA -Drucker
- Laserschneiden , Bohren & mechanische Fertigung
Integration sicherheitsrelevanter Hardware
- Integration von Not-Aus-Schaltern, Sicherheits-I/O und zertifizierten Komponenten
- Unterstützung für Sicherheitskonzepte und systemweite Sicherheitsarchitektur
- Abstimmung mit Sicherheits- und Compliance-Anforderungen
Typische Anwendungsfälle
- Kundenspezifische Roboter- und Subsystementwicklung
- Hardware für Energieüberwachung und Energiemanagement
- Sicherheitsrelevante Elektronik und Schnittstellen
- Forschungs- und industrielle F&E-Projekte
Von kundenspezifischer Hardware bis hin zu kompletten Robotersystemen – wir begleiten Projekte von der Konzeption bis zur Implementierung. Kontaktieren Sie uns, um Ihre Anwendung zu besprechen.
Proof-of-Concept-Entwicklung
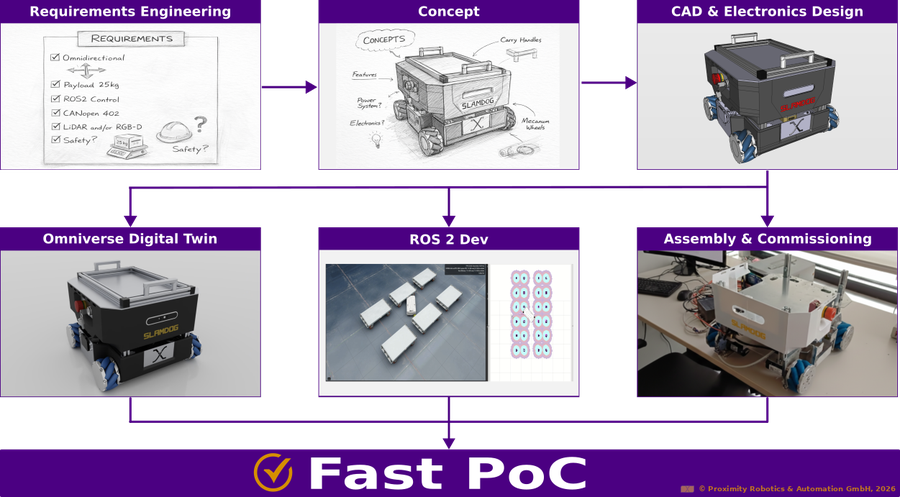
PoC-Entwicklung & On-Site Validierung konzentrieren sich darauf , validierte Simulationskonzepte und technische Ideen in funktionierende, demonstrierbare Robotersysteme unter realen Betriebsbedingungen umzusetzen.
Viele Projekte scheitern zwischen vielversprechenden Konzepten und der Implementierung, weil PoCs entweder zu experimentell oder zu riskant für Tests vor Ort sind. Dieser Service schließt diese Lücke durch kontrollierte, sicherheitsorientierte PoCs, die Machbarkeit, Leistung und Integrationspotenzial demonstrieren, ohne den laufenden Betrieb zu stören.
PoC-Design & Scoping
- Definition klarer Ziele und Erfolgskriterien für den Proof of Concept
- Auswahl von Robotern, Sensoren und Systemarchitektur
- Abstimmung mit betrieblichen Einschränkungen und Sicherheitsanforderungen
Simulationsgestützte PoC-Entwicklung
- Wiederverwendung von digitalen Zwillingen und Simulationsressourcen, sofern verfügbar
- Validierung von Steuerung, Wahrnehmung und Systemverhalten vor der On-Site Prüfung
- Frühzeitige Identifizierung von Risiken und Einschränkungen im Prozess
On-Site Deployment & Tests
- Kontrollierte Installation und Einrichtung in der realen Umgebung
- Stufenweise Aktivierung von Systemfunktionen
- Tests unter realistischen Betriebsbedingungen
Sicherheitsbewusster Betrieb
- Temporäre und permanente Sicherheitsmaßnahmen während des PoC-Betriebs
- Integration von Not-Aus-Schaltern und sicherheitszertifizierten Komponenten, wo erforderlich
- Klare operative Grenzen für Testphasen
Validierung, Bewertung & Übergabe
- Messung von Leistung, Zuverlässigkeit und Einschränkungen
- Dokumentation der Ergebnisse und Empfehlungen
- Klare Anleitung für die nächsten Schritte in Richtung Implementierung oder Skalierung
Typische Anwendungsfälle
- Bewertung neuer Automatisierungs- oder Robotikkonzepte
- Unternehmensweite Forschungs- und Entwicklungsprojekte sowie Innovationspiloten
- Öffentlich finanzierte oder gemeinschaftliche F&E-Projekte
- Erster Einsatz von lernbasierten oder fortgeschrittenen Robotersystemen
Intelligente Infrastruktur
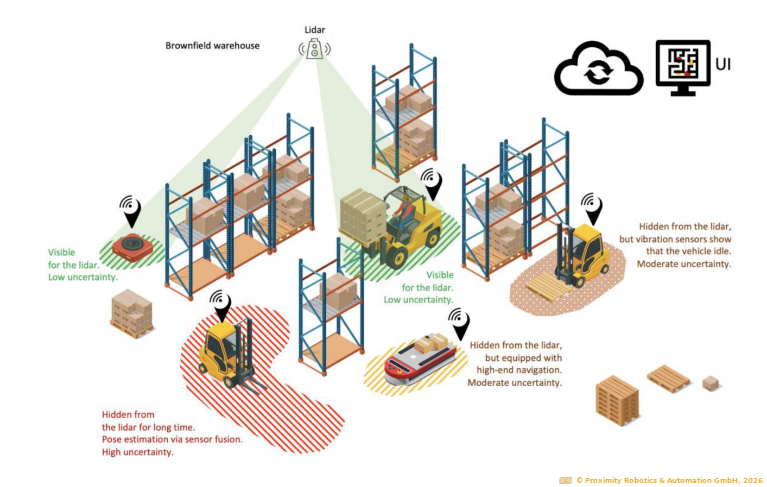
Intelligente Infrastruktur-Integration konzentriert sich auf die nahtlose Interaktion zwischen Robotersystemen und ihrer umgebenden Infrastruktur. Anstatt Roboter als isolierte Maschinen zu betrachten, verbindet dieser Service sie mit Gebäuden, Anlagen und Betriebssystemen, um einen koordinierten, sicheren und effizienten Betrieb zu ermöglichen.
Der Service ist für Umgebungen konzipiert, in denen Roboter mit Türen, Aufzügen, Zugangskontrollsystemen, Sicherheitssystemen und Gebäudeautomation interagieren müssen, wie beispielsweise Fabriken, Lagerhallen, Krankenhäuser und öffentliche Gebäude.
In vielen Fällen gehören Systemsensorik und -intelligenz in die Infrastruktur und nicht in jeden einzelnen Roboter . Die Integration eines geteilten Sensors oder Kontrollpunkts in die Umgebung kann robuster, kostengünstiger und wartungsfreundlicher sein als die Ausstattung jedes Roboters einer Flotte mit redundanten Sensoren. Unser Ansatz bewertet diesen Zielkonflikt explizit und entwickelt Lösungen, die Flottenkomplexität, Infrastrukturkapazitäten und langfristige Betriebseffizienz in Einklang bringen.


Integration mit Gebäudeautomation
- Integration mit KNX-basierten Gebäudeautomationssystemen
- Steuerung und Überwachung von Türen, Beleuchtung, Zugangspunkten und Umgebungssignalen
- Koordination zwischen Robotern und Anlagenautomationslogik
Kommunikations- & Messaging-Infrastruktur
- Integration mittels ROS 2 / DDS für Echtzeit-Roboterkommunikation
- ZeroMQ für Datenaustausch mit geringer Latenz und hohem Durchsatz
- MQTT für ereignisgesteuerte Kommunikation und Integration mit Überwachungs- oder Gebäudesystemen
Industrie- & Anlagenschnittstellen
- Schnittstellen zu industriellen Netzwerken wie CAN, CANopen, EtherCAT und Ethernet-basierten Systemen
- Integration mit Sicherheitssystemen und Anlagensteuerungen
- Zuverlässige Kommunikation zwischen Robotern, Maschinen und Infrastrukturkomponenten
Systemkoordination & Verhaltensintegration
- Definition der Interaktionslogik zwischen Robotern und Infrastruktur
- Umgang mit gemeinsam genutzten Ressourcen (Aufzüge, Türen, Flure)
- Robustes Verhalten bei Netzwerk- oder Komponentenausfällen
Typische Anwendungsfälle
- Roboter, die mit Beleuchtungs-, Aufzugs- und Zutrittskontrollsystemen interagieren
- Autonomer Transport in Lagerhallen und Fabriken
- Krankenhauslogistik und Servicerobotik
- Intelligente öffentliche und halböffentliche Umgebungen
Für wen es gedacht ist
- Anlagenbetreiber und Infrastruktureigentümer
- Industrie- und Logistikunternehmen
- Gesundheitswesen und öffentliche Einrichtungen
- Systemintegratoren und Automatisierungsanbieter
Intelligente Infrastruktur ermöglicht es Robotern, sich an größeren Automations- und Überwachungsumgebungen zu beteiligen, die über die Roboterflotte selbst hinausgehen.
Netzwerk- & Cloud-Robotik
Der Service Netzwerk- und Kommunikationstechnik konzentriert sich auf die Entwicklung, Sicherung und Optimierung von Kommunikationsinfrastrukturen mit geringer Latenz und hoher Zuverlässigkeit für Robotersysteme, die in anspruchsvollen Umgebungen eingesetzt werden.
Moderne Robotik ist auf stabile Netzwerke angewiesen – nicht nur für Steuerung und Wahrnehmung, sondern auch für Fernzugriff, Visualisierung, Zusammenarbeit und sicheren Betrieb .
Robotikorientiertes Netzwerkdesign
- Kabelgebundenes und drahtloses Netzwerkdesign für mobile Roboter und Sensoren
- WiFi 6 / WiFi 7: Planung für hohe Gerätedichte und Mobilität
- Hochleistungsfähige Netzwerk-Backbones
- Streaming-Architekturen mit niedriger Latenz (WebRTC)
QoS & Verkehrsplanung
- Quality of Service (QoS) für die Steuerung, Wahrnehmung und Überwachung des Datenverkehrs
- Trennung von Echtzeit- und nichtkritischen Datenflüssen
- Priorisierung sicherheits- und kontrollrelevanter Kommunikation
DDS & ROS 2 Kommunikationsoptimierung
- DDS-Konfiguration und -Optimierung für ROS 2-Systeme
- Multicast-, Erkennungs- und Transportoptimierung
- Zuverlässige Kommunikation trotz Paketverlust und Störungen
Sicherer Fernzugriff und Konnektivität
- Kundenspezifische VPN-Lösungen mit WireGuard und VLESS
- Sicherer Fernzugriff für Entwicklung, Überwachung und Betrieb
- Netzwerksegmentierung und Zugriffskontrolle für Robotersysteme
Validierung und Stresstests
- Lasttests unter realistischen Verkehrsmustern (Video, LiDAR, DDS)
- Validierung in feindlichen RF-Umgebungen
- Überwachung und Leistungsanalyse
Identitäts- und Benutzerverwaltung
- Benutzer- und Zugriffsverwaltung mittels OIDC/SAML
- Integration mit Keycloak für zentrale Authentifizierung und Autorisierung
- Rollenbasierte Zugriffskontrolle für Roboter, Infrastruktur und Werkzeuge