Energiebewusste Humanoide
Drahtloses Laden während der Bewegung für energiebewusste humanoide Roboter
Humanoide Roboter entwickeln sich rasant zu einer bahnbrechenden Technologie in verschiedensten Anwendungsbereichen, darunter industrielle Fertigung, Logistik, Gesundheitswesen, Bildung und Servicerobotik. Mit zunehmender Autonomie dieser Systeme und ihrer Fähigkeit zu komplexen Ganzkörperbewegungen steigt auch ihre Abhängigkeit von fortschrittlichen Wahrnehmungsmodulen, integrierter KI und Aktorik mit mehreren Freiheitsgraden. Diese Entwicklung führt zu einem deutlich erhöhten und hochdynamischen Energieverbrauch. Die Gewährleistung eines kontinuierlichen Betriebs, die Minimierung von Ausfallzeiten und die Aufrechterhaltung der Energieeffizienz stellen daher grundlegende Herausforderungen für den praktischen Einsatz humanoider Roboter in realen Umgebungen wie intelligenten Fabriken, Lagerhallen und Krankenhäusern dar.

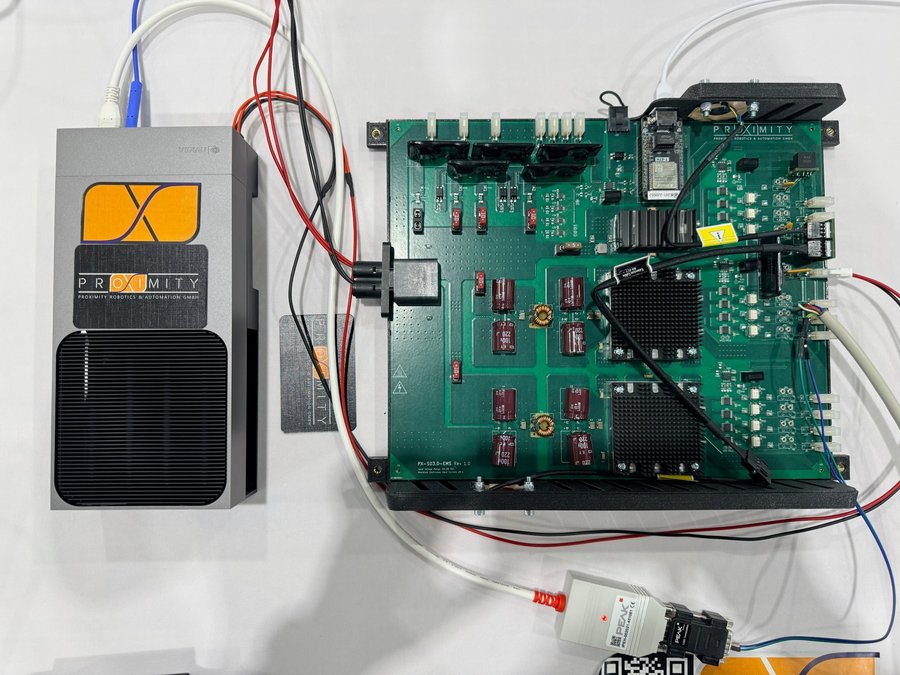
- pxEMS zur Energieprofilierung von Humanoiden
- Nachhaltige Robotik
- Parameteroptimierung mithilfe digitaler Zwillinge
- Roboteraufgabenoptimierung für WPT
- RL-basierte Lokomotionserzeugung mit Energiebeschränkungen
Wir legen den Schwerpunkt auf:
Ununterbrochener Betrieb für Humanoide
- Kontinuierliche Energieversorgung für Roboter : Ermöglicht den dauerhaften Betrieb humanoider Roboter ohne manuelle Batteriewechsel oder feste Dockingstationen.
- Kontinuierliches Energiemanagement : Umstellung von diskreten Ladezyklen auf fortlaufende, lernbasierte Energieoptimierung zur Minimierung von Ausfallzeiten.
- Gemeinsame Optimierung von Mobilität und Energieaufnahme : Ausgewogene Steuerung von Fortbewegungsstabilität, Aufgabenleistung und Energiegewinnung in einem einheitlichen Regelungsrahmen
Drahtlose Energieübertragung (WPT)
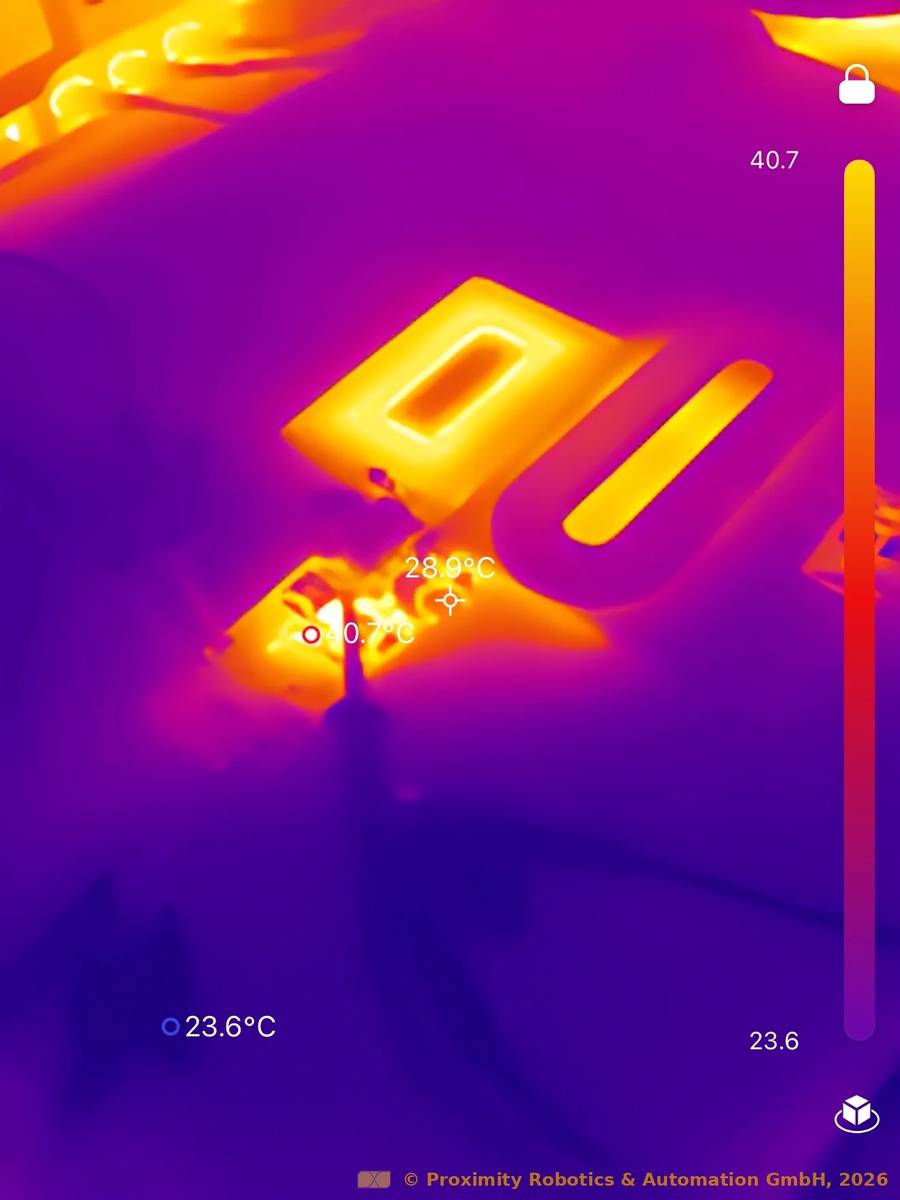
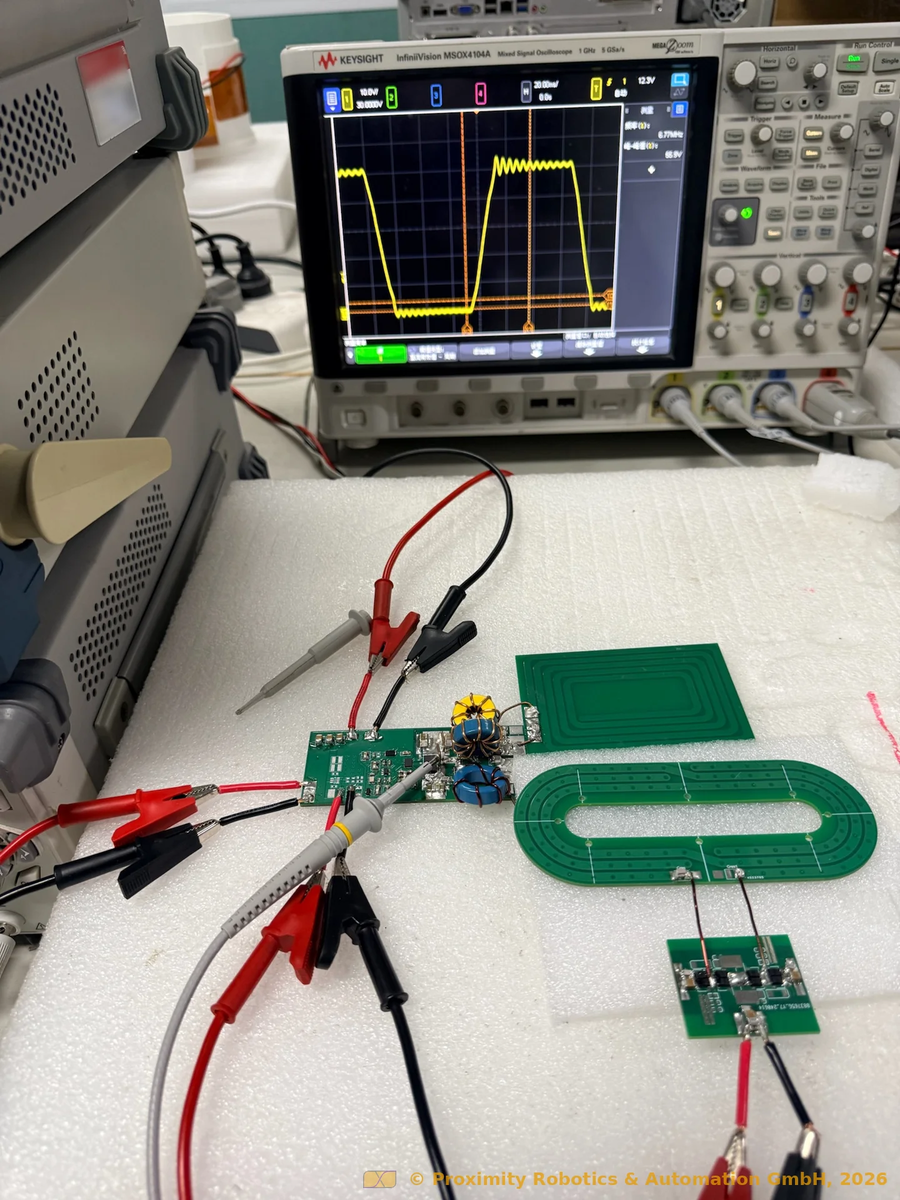
- Drahtlose Energieübertragung im MHz-Bereich (6,78 MHz) : Hochfrequente drahtlose Energieübertragung ermöglicht im Vergleich zu herkömmlichen Ansätzen im kHz-Bereich kompakte, leichte und hochleistungsfähige Ladesysteme.
- Reduzierte Größe und Gewicht der Ladehardware : Verzicht auf sperrige Ferritmaterialien, wodurch mechanisch robuste und humanoide Lademodule entstehen.
- Laden in Bewegung : Unterstützt drahtlose Energieübertragung beim Gehen, Stehen oder Ausführen von Tätigkeiten – ohne präzise Docking-Anforderungen.
Energiebewusste Steuerungsrichtlinien
- Lokomotionsanpassung basierend auf Reinforcement Learning: Nutzt Reinforcement Learning, um Gangart, Körperhaltung und Fußplatzierung anzupassen und so die Ladeeffizienz während der Bewegung zu verbessern.
- Lademodulbewusste Lokomotionsoptimierung : integriert die räumliche Verteilung der WPT-Sender direkt in die Lokomotionsstrategie und ermöglicht es Robotern so, hocheffiziente Bereiche auszunutzen.
- Energiebewusste Ladestrategien: Optimiert den Ladevorgang aus einer Steuerungsperspektive heraus, anstatt ihn als separates Subsystem zu behandeln.
Infrastrukturgestützte Energiesysteme
- Umgebungsintegrierte Ladeinfrastruktur: WPT-Sender werden in Fußböden und Arbeitsbereiche eingebettet, sodass während des normalen Betriebs opportunistische Energieauffüllung möglich ist.
- Nahtlose Energieintegration: richtet Infrastruktur und Roboterintelligenz aufeinander aus, um kooperative Energieökosysteme zu schaffen.
- Energie-Orchestrierung auf Infrastrukturebene: Koordiniert mehrere eingebettete WPT-Module, um die Ladekapazität dynamisch auf Basis der Roboterposition, des Bedarfs und der Aufgabenpriorität zuzuweisen.
Durch den Batteriewechsel wird die Laufzeit verlängert – die drahtlose Energieübertragung ermöglicht einen kontinuierlichen Betrieb.
Rüsten Sie Ihre humanoide Plattform auf unterbrechungsfreien, energieeffizienten Betrieb auf. Kontaktieren Sie uns, um die Möglichkeiten zu erkunden.
Auch für mobile Robotersysteme geeignet.