pxIsaacSimURDFImporter
Die Integration eines Roboters in eine Simulation ist selten ein einstufiger Prozess. Insbesondere in der frühen Prototypenphase, wenn sich Komponenten, Sensoren oder kinematische Strukturen häufig ändern, wird die Aufrechterhaltung eines konsistenten Simulationsmodells schnell zeitaufwändig und fehleranfällig.
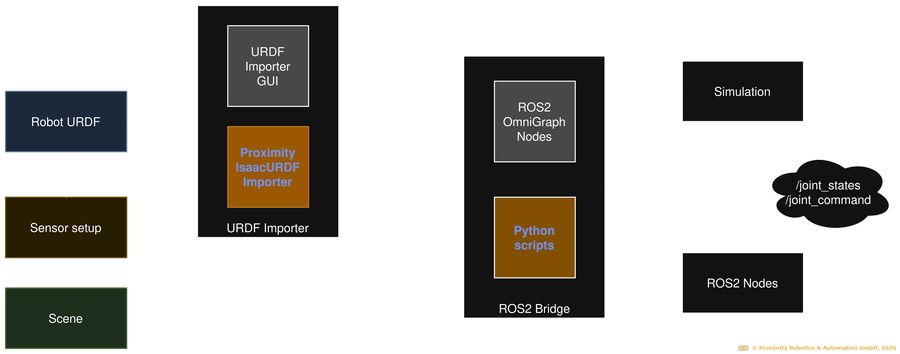
Der pxIsaacSimURDFImporter vereinfacht diesen Prozess, indem er den Import von Robotern in NVIDIA Omniverse Isaac Sim direkt aus deren URDF/xacro-Beschreibungen automatisiert. Anstatt Assets für jede Iteration manuell anzupassen, können Entwickler eine komplette Simulationsszene mit einem einzigen Befehl initialisieren, was den Setup-Prozess beschleunigt und die Reproduzierbarkeit verbessert.
- Importiert Roboter direkt aus URDF/xacro-Dateien in Isaac Sim.
- Startet komplette Simulationsszenen mit einem einzigen Befehl
- Integriert ROS-fähige Sensoren, Joint States und ros2_control.
- Bietet eine erweiterbare und anpassbare Open-Source-Architektur
Nahtlose URDF-Integration
Automatischer Import von Robotern aus ihren URDF/xacro-Beschreibungen in Isaac Sim – unter Beibehaltung und Erweiterung von Struktur, Parametern und Sensorkonfigurationen mit hoher Genauigkeit.
ROS 2-native Kompatibilität
Lässt sich nahtlos in bestehende ROS-basierte Simulations- und Steuerungsworkflows integrieren. Der Import unterstützt standardmäßig Joint States, Sensor-Topics und ROS 2-Controller.
Flexibles und reproduzierbares Prototyping
Schnelle Iterationen ohne wiederholten manuellen Aufwand. Konfigurieren Sie Importparameter nach Bedarf und erzeugen Sie mit jedem Build konsistente, simulationsbereite Umgebungen.
Der pxIsaacSimURDFImporter ist Open Source und wird aktiv weiterentwickelt, mit laufender Unterstützung für neuere Versionen von Isaac Sim und ROS.
Erkunden Sie den Quellcode auf GitHub: PX_IsaacSim_URDF_Importer , oder testen Sie ihn mit unserem Slamdog 3.0 Mini- Roboter mit PX_IsaacSim_URDF_Importer_SLAMDOG3 .