Slamdog 3.0 mini
Slamdog 3.0 mini ist ein ROS 2-nativer mobiler Roboter, der als modulare Referenzplattform für Forschung, Lehre und angewandte Robotikentwicklung konzipiert wurde. Dank seines modularen Aufbaus lässt er sich leicht an unterschiedliche Anwendungen, Sensorkonfigurationen und Hardware-Setups anpassen und gewährleistet gleichzeitig reproduzierbare Arbeitsabläufe zwischen Simulation und realer Hardware.
Anstatt auf eine feste Anwendung ausgerichtet zu sein, bietet Slamdog 3.0 mini eine flexible Grundlage für die Validierung von Algorithmen, Systemarchitekturen und Robotikkonzepten unter realistischen Bedingungen.


Hauptmerkmale
- Modulare Architektur
- ROS 2-nativer Open-Source-Software-Stack
- Omnidirektionalen Antrieb und Emulator für Differenzialantrieb
- Einsatzbereit für die Simulation: Voll unterstütztes Open-Source-Modell für NVIDIA Isaac Sim
Technische Daten
- Abmessungen (L x B x H): 400 x 400 x 334 mm (inkl. Griffe)
- Gewicht: ca. 20 kg (inkl. Batterie)
- Nutzlast: 20 kg
- Höchstgeschwindigkeit: 1,7 m/s
Hardwareoptionen
- NVIDIA Jetson AGX als Onboard-Controller
Führen Sie Perzeptions-, Robotik- und lernbasierte Anwendungen direkt auf dem Roboter aus. - 2D-/3D-LiDAR-Systeme
Slamtec, Seyond, RoboSense - RGB-D-Kameras
Intel RealSense D455 / D455f
Stereolabs ZED-Serie - Event-basierte Kameras
IDS uEye XCP-E (IMX636)
Ideal für die Lehre
- Open-Source-Plattform, ROS 2-nativ – sofort einsatzbereit!
- Vollständig integrierter digitaler Zwilling
Vom Start in der Simulation bis zur realen Hardware – mit NVIDIA Omniverse Isaac Sim können Studierende den gesamten Workflow durchlaufen und praxisnahe Kompetenzen erwerben. (github). - Als Selbstmontage-Kit erhältlich
Ermöglicht praxisnahes Lernen in den Bereichen Systemintegration, Mechanik, Elektronik und Software.
Energieoptimierte Robotik
- Integrierte Energiemessung (optional)
pxEMS ermöglicht die Echtzeitüberwachung des Stromverbrauchs während Experimenten und der Ausführung von Aufgaben. - Lehre mit Fokus auf Energieeffizienz
Fördert die Vermittlung von Methoden zur Energieanalyse, zum Vergleich von Algorithmen und zum energieeffizienten Systemdesign. - Bereit für die Forschung
Unterstützt reproduzierbare Energiemessungen über verschiedene Hardware- und Softwarekonfigurationen hinweg.
Noch nicht überzeugt?
Erleben Sie SLAMDOG 3.0 mini in der Simulation durch die NVIDIA Omniverse Isaac Sim-Integration : github - PX_IsaacSim_URDF_Importer_SLAMDOG3
pxEMS
pxEMS ist ein hardwarebasiertes Energiemanagementsystem, das den Energieverbrauch in robotischen und Physical-AI-Systemen zu einem messbaren, steuerbaren und optimierbaren Parameter macht.
Moderne Roboter vereinen leistungsstarke Recheneinheiten, umfassende Sensorik und komplexe Aktorik – oft ohne klare Transparenz darüber, wo tatsächlich Energie verbraucht wird. pxEMS schließt diese Lücke, indem es den Energieverbrauch durch hochauflösende, mehrkanalige Energieüberwachung und -steuerung messbar und Handlungen möglich macht. Das System erfasst kontinuierlich die Energieflüsse über bis zu 16 unabhängige Kanäle und liefert detaillierte Einblicke in den Energieverbrauch einzelner Subsysteme während realer Aufgaben. So ermöglicht es eine energieoptimierte Systementwicklung von der Simulation und dem Machbarkeitsnachweis bis hin zum Einsatz.
Dank der nahtlosen Integration in ROS-2-Umgebungen ermöglicht pxEMS eine ganzheitliche Betrachtung des Systems und berücksichtigt dabei gleichzeitig Energieeffizienz, Leistung, Sicherheit und Zuverlässigkeit – und unterstützt so eine nachhaltige, datenbasierte Robotik.

Hauptmerkmale
- Bis zu 16 Kanäle zur Überwachung des Stromverbrauchs von Recheneinheiten, Sensoren, Aktoren und Subsystemen
- Mehrere Spannungsstufen: Batteriespannung, 24 V, 12 V und 5 V
- Nahtlose Integration in ROS-2-Umgebungen über micro-ROS
Typische Anwendungsfälle
- Energieanalyse von mobilen Robotern, Manipulatoren und humanoiden Robotern
- Energieoptimierte Steuerung und Policy-Optimierung
- Validierung von Energiemodellen in digitalen Zwillingen
- Nachhaltigkeitsorientierte Automatisierungsprojekte
- Forschung und industrielle F&E-Umgebungen
Anwendungsgebiete
Nachhaltigkeit wird zu einer zentralen Anforderung an moderne Robotersysteme. Da Roboter immer leistungsfähigere Rechen-, Sensor- und Aktoriksysteme integrieren, muss Energieeffizienz als zentrales Entwurfsmerkmal und nicht als nachgelagerter Aspekt betrachtet werden.
- Wir unterstützen die akademische Forschung im Bereich energieoptimierter Robotik durch ein kostenloses pxEMS-Leihprogramm . Kontaktieren Sie uns für weitere Informationen.
- Unternehmen aus den Bereichen Robotik und Automatisierung können pxEMS nutzen, um Nachhaltigkeitsversprechen zu untermauern und die Betriebszeit pro Batterieladung zu verlängern – kontaktieren Sie uns, um mehr zu erfahren.
pxSafeRemote
pxSafeRemote ist eine Safety-zertifizierte Fernbedienung für Robotersysteme für Einsatzszenarien mit erhöhten Sicherheitsanforderungen jenseits gängiger Consumer-Lösungen.
pxSafeRemote ist vollständig in ROS 2 integriert und ermöglicht einen zuverlässigen Betrieb über große Entfernungen unter Einhaltung der industriellen Sicherheitsstandards für Not-Aus- und Steuersignale . Es bildet eine sichere Brücke zwischen experimentellen Systemen und sicherheitskonformem Betrieb und gewährleistet so die Evaluierung von Automatisierungs- und Robotersystemen in frühen Entwicklungsstadien, ohne die Sicherheit des Personals oder die Einhaltung von Vorschriften zu gefährden.

- Not-Aus- und Sicherheitssteuerungsfunktionen bis Kategorie 3, PL e / SIL 3
- Zuverlässiger drahtloser Betrieb über 100 m, geeignet für industrielle Anwendungen und den Einsatz im Freien
- ROS 2-native Integration
- Integriertes 2,1-Zoll-Grafikdisplay und Vibrationsfeedback für klare Systemstatus- und Warnmeldungen
- Geeignet für Szenarien, in denen sich die Sicherheitsanforderungen schneller weiterentwickeln als das System selbst
Brücke zwischen PoC und Sicherheitskonformität
Ermöglicht kontinuierliche Tests und Inbetriebnahmen bei neu auftretenden Sicherheitsanforderungen – ohne Unterbrechung der Entwicklung.
Keine „Bluetooth-Joystick“-Kompromisse
Speziell entwickelt für Robotikprojekte, bei denen handelsübliche Controller nicht mehr akzeptabel sind.
Plug-and-Play für Omniverse- und ROS 2-basierte Roboter
Lässt sich direkt in bestehende Omniverse Simulations-, ROS 2 Steuerungs- und Sicherheitsarchitekturen integrieren.
Sie haben Interesse daran, diese Fernbedienung zu testen oder in Ihr Projekt zu integrieren? Kontaktieren Sie uns für weitere Informationen.
pxMobileNet
Hochleistungsfähige Netzwerkinfrastruktur für Robotik-Demos und -Ausstellungen
pxMobileNet ist eine portable, vorkonfigurierte Netzwerkinfrastruktur, die für Robotik-Demonstrationen, Ausstellungen und kurzfristige Einsätze in Umgebungen mit überfüllten, unvorhersehbaren und schwierigen Funkbedingungen entwickelt wurde.
Auf Messen und in Demo-Umgebungen kommt es häufig zu Störungen, überlastetem WLAN und instabilen Verbindungen – was Robotik-Demos gefährdet. pxMobileNet bietet ein kontrolliertes, leistungsstarkes Kommunikationsnetzwerk , das einen zuverlässigen Betrieb genau dann gewährleistet, wenn es darauf ankommt.
Verfügbar als Mietservice oder für projektspezifische Einsätze .
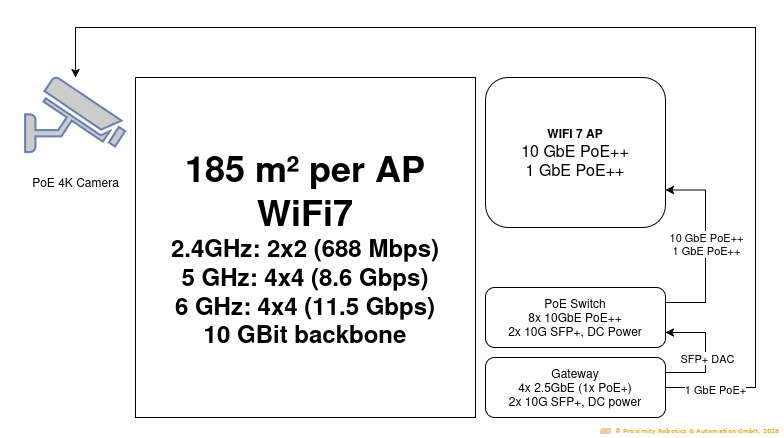

Was pxMobileNet beinhaltet
- WiFi 7-Zugangspunkte mit hoher Clientkapazität und schnellem Roaming
- 10-GbE-Backbone mit PoE++ für Kameras, Access Points und Edge-Geräte
- Unterstützung für Sensoren mit hoher Bandbreite (4K PoE-Kameras, LiDARs)
- Vorkonfigurierte QoS-Profile für Robotik-Workloads
- Gateway- und Switching-Infrastruktur optimiert für ROS 2 / DDS-Datenverkehr
Wichtigste Vorteile
- Robuster Betrieb in feindlichen HF-Umgebungen
- Keine Abhängigkeit vom WLAN des Veranstaltungsortes
- Schneller Auf- und Abbau
- Bekannte, geprüfte Leistungsmerkmale
- Weniger Stress für Demo-Teams
- Unterbrechungsfreie, nachhaltige Stromversorgung
Optionale Zusatzfunktionen
- Einrichtung und Unterstützung vor Ort
- HF- und Netzwerküberwachung während der Veranstaltung
- Integration mit Roboter- und Sensorsystemen
- Private Adressierung und sicherer VPN-Fernzugriff
- 5G-Konnektivität
- Satelliteninternetanschluss
- KI-gestützte Überwachung und Standortüberwachung
- M2.2230 WiFi7-Module für Edge-Geräte (Jetson AGX)