OmniABiD-Datensatz
OmniABiD ist ein offener Datensatz zur Evaluierung von Sicherheits- und Risikoüberwachungsmethoden in der industriellen Mensch-Roboter-Kollaboration (MRK) . Er kombiniert hochpräzise simulierte Szenarien (NVIDIA Omniverse Isaac Sim) mit realen Aufnahmen und ermöglicht so einen systematischen Vergleich von Algorithmen in Simulation und Realität unter konsistenten Interaktionsbedingungen.
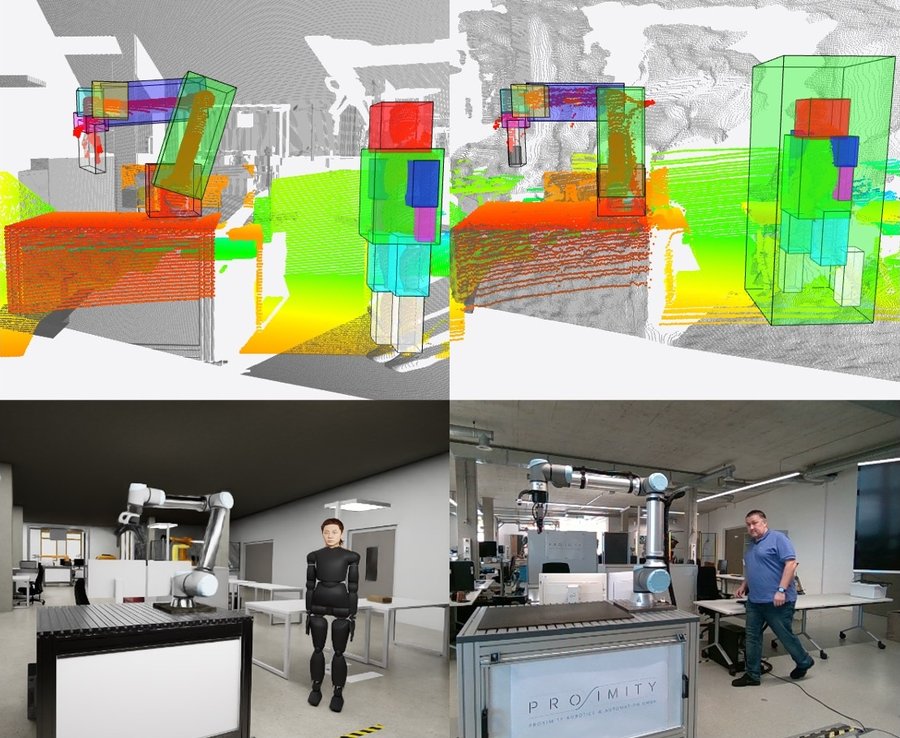
- Industrielle MRK-Szenarien in Simulation und realen Umgebungen für die Bewertung des Sim-to-Real-Transfers
- Schwerpunkt auf Gefahrenanalyse und Risikoüberwachung bei Kooperations-/Koexistenzaufgaben
- Geeignet für das Benchmarking von Risikokennzahlen und sicherheitsbezogenen Perzeptions-/Überwachungspipelines
Benchmarking des Sim-to-Real-Transfers von Sicherheitsüberwachungsmethoden
Bewertung des Risikomonitorings in realistischen industriellen Interaktionsmustern (Übergabe/Zusammenarbeit/Koexistenz)
Trainings-/Validierungsdatensätze für sicherheitsorientierte Perzeptions- und Monitoring-Pipelines
Werfen Sie einen Blick auf unsere Publikationen:
- F. Plahl, G. Katranis, K. Alba, F. Wolny, S. Vock, A. Morozov und I. Mamaev, „OmniABiD: Evaluating Sim2Real Transferability in Safety and Risk Monitoring of Human-Robot Collaboration using NVIDIA Omniverse“, in Proc. 17th Eur. Rob. Forum (ERF), 2026, erscheint demnächst.
Erfahren Sie mehr über unsere Arbeit zum Thema Sicherheit in der Robotik im Rahmen des Projekts CogniSafe3D .
Entdecken Sie OmniABiD auf GitHub: OmniABiD@github
LiHRA-Datensatz
LiHRA ist ein offener Datensatz für die automatisierte Risikoüberwachung in der Mensch-Roboter-Interaktion (MRI) basierend auf hochauflösendem 3D-LiDAR . Er kombiniert 3D-Punktwolken , menschliche Schlüsselpunkte und Gelenkzustände des Roboters zur Unterstützung von Verfahren zur Echtzeit-Risikoerkennung und -bewertung. Der Datensatz umfasst über 4.400 annotierte Bilder und beinhaltet sowohl beabsichtigte Kontakte als auch unbeabsichtigte Kollisionen, um eine Evaluierung unter sicherheitskritischen Bedingungen zu ermöglichen.
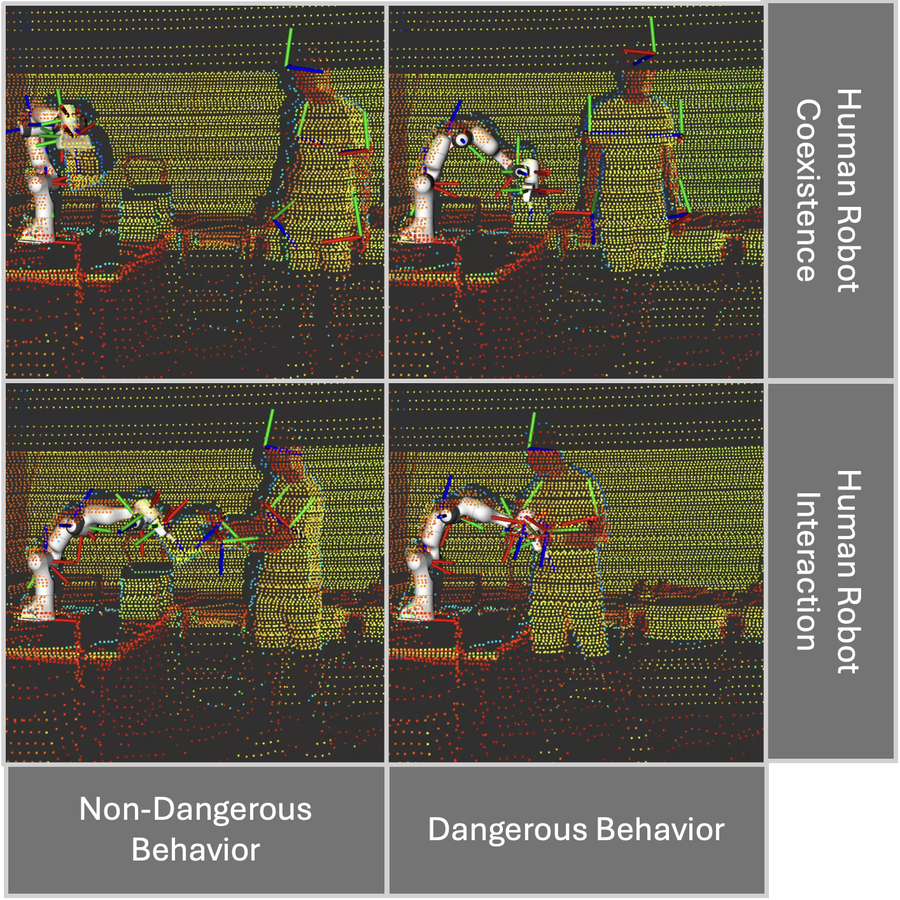
- LiDAR-zentrierter Datensatz für die Risikoüberwachung mit abgestimmten Zustandsinformationen von Mensch und Roboter
- Beinhaltet hochauflösende Punktwolken, menschliche Schlüsselpunkte und Gelenkzustände des Roboters
- Mehr als 4.400 beschriftete Frames mit Kollisions- und Kontaktszenarien
- Unterstützt die Entwicklung KI-gestützter Sicherheitsüberwachungs- und proaktiver Risikobewertungsmethoden
Werfen Sie einen Blick auf unsere Publikationen:
- F. Plahl, G. Katranis, I. Mamaev und A. Morozov, „LiHRA: Ein LiDAR-basierter HRI-Datensatz für automatisierte Risikoüberwachungsmethoden“, in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2025.
- G. Katranis, F. Plahl, J. Grimstadt, I. Mamaev, S. Vock und A. Morozov, „Dynamische Risikobewertung für die Mensch-Roboter-Kollaboration mittels eines heuristikbasierten Ansatzes“, in: Proc. 35th Eur. Saf. Reliab. Conf. (ESREL), 2025, S. 1830–1837.
Erfahren Sie mehr über unsere Arbeit zum Thema Sicherheit in der Robotik im Rahmen des Projekts CogniSafe3D .
Entdecken Sie LiHRA auf GitHub: LiHRA@github